

Voorkomen van botsingen van AGV’s onder alle weersomstandigheden
Radarsensor met ingebouwde CAN Interface voor transportvoertuigen zonder bestuurder
De toepassing
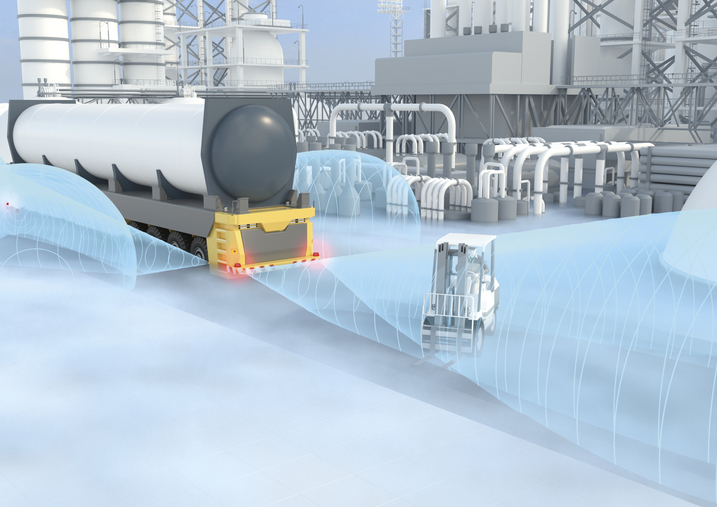
In de chemische industrie worden Automatisch Geleide Voertuigen (AGV’s) op veel plaatsen op het bedrijfsterrein ingezet. Maar de routes worden ook door andere voertuigen gebruikt. Als de AGV’s onder alle weersomstandigheden over onzeker terrein moeten rijden, moet er te allen tijde voor worden gezorgd dat botsingen met andere voertuigen of objecten, die zich op hun route aan alle kanten bevinden, worden voorkomen.
Het doel
Het voertuig moet veilig worden stilgezet voordat een botsing dreigt te gebeuren, en indien nodig, moet er een routecorrectie worden uitgevoerd. Om dit mogelijk te maken moeten de sensoren de route op grote afstand bewaken. Als een obstakel wordt gedetecteerd, stuurt de sensor een bijbehorend signaal naar de besturingseenheid en vertraagt het AGV. Bovendien moet de gebruikte sensortechnologie objectdetectie in ongunstige omgevingen garanderen. In de chemische industrie stijgt stoom vaak op uit het afvalwatersysteem. Ondanks deze stoom moeten objecten worden gedetecteerd zodat het AGV een botsing kan vermijden. Zulke externe omstandigheden vormen een uitdaging voor optische sensoren, want die kunnen gemakkelijk worden omzeild met radartechnologie. Radarsensoren kunnen zware weersomstandigheden weerstaan en op betrouwbare wijze functioneren bij vuil, vocht, mist of andere interferenties.
Afhankelijk van de gevaarlijke situatie, moet het veiligheidssysteem voldoen aan een specifiek prestatieniveau (PL) of veiligheidsintegriteitsniveau (SIL). Dit vereist een volledig betrouwbare detectie of afstandsmeting binnen de desbetreffende omgeving. Daarom moet de toepassing prestatieniveau c (PL c) bereiken.
De oplossing
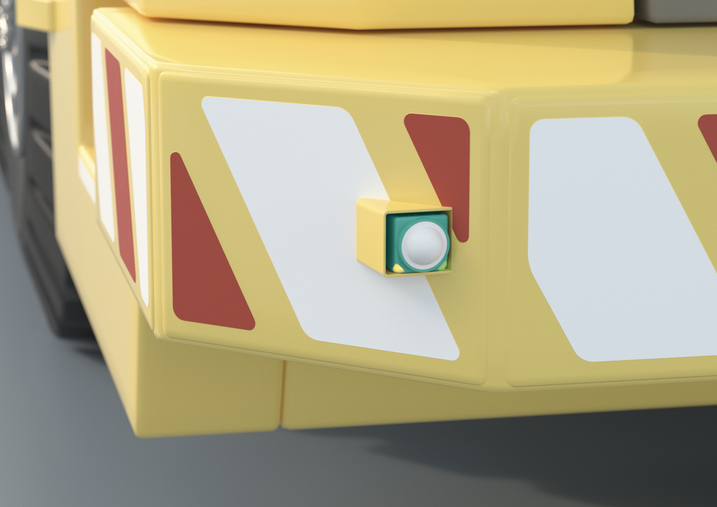
Radarsensoren met frequentie-gemoduleerde continue golven (FMCW) zijn ideaal voor optimale bewaking van de belangrijkste rijrichtingen, zelfs onder deze zware omgevingsomstandigheden. De sensoren van de MWC25M-L2M-*serie meten natuurlijke objecten op betrouwbare wijze en detecteren mogelijke botsingen van tevoren, ongeacht het weer of andere externe omstandigheden.
Het sensorbereik kan worden aangepast aan de omgeving dankzij voorgrond- en achtergrondonderdrukking. Ook is het mogelijk om tussen drie meetmodi te wisselen, afhankelijk van de toepassing. De “eerste object”-modus detecteert altijd het object het dichtst bij de sensor, en wordt gebruikt voor het voorkomen van botsingen van AGV’s. Door de hoge samplingfrequentie van tot wel 200 Hz kunnen de afstand tot objecten in het zichtveld (FOV) en hun relatieve snelheid op betrouwbare wijze worden gemeten.
Afhankelijk van het vereiste niveau wat betreft prestaties of veiligheidsintegriteit, kunnen de radarsensoren van de MWC*-L2M-B16-serie met enkele of redundante configuratie worden ingezet. Een aangepast veiligheidsconcept in combinatie met een diagnostisch capabele controller bevestigt de geschiktheid van de sensoren voor toepassingen die relevant zijn voor de veiligheid, en zorgt dat de gebruiker eenvoudiger het bijbehorende bewijs kan leveren.
Technische eigenschappen
- Meetbereik: 0,5–25 m
- Werkfrequentie: 122,25 … 123 GHz
- Beschermingsgraad: IP68/IP69
- Dode zone: 0–0,5 m
- Temperatuurbereik: –40 °C … +70 °C
- Uitgebreide elektromagnetische compatibiliteit, vergelijkbaar met E1-niveau en pulsen
De voordelen

De ingebouwde CAN-interface van de serie maakt eenvoudige integratie in het CANopen-bussysteem van het voertuig mogelijk. Bovendien wordt de statusinformatie over de sensor toegankelijk gemaakt, bijvoorbeeld de “hartslag van de producent” en de betrouwbaarheid van de gemeten afstandswaarden. Deze gegevens kunnen alleen worden gebruikt in een veilig controlesysteem om te controleren of de sensor juist werkt. Hierdoor is het mogelijk om prestatieniveau c (PL c) categorie 2 te bereiken en de toepassing veilig op te lossen, zelfs bij het aanpassen. Het instellen van de parameters is eenvoudig met de CANopen-software voor het instellen van parameters en PACTware DTM.
In één oogopslag
- Ingebouwde CAN-interface
- Prestatieniveau c (PL c)
- Voorkomen van botsingen van AGV’s aan de voor- en achterkant (optioneel aan de zijkant)
- Radartechnologie is bijzonder geschikt voor zware weersomstandigheden

De industriële radarsensoren van Pepperl+Fuchs bieden u afstands- en snelheidsmetingen zonder interferenties, zelfs bij regen, mist, wind of stof. Meer informatie over dit unieke sensorische werkingsprincipe en alle voordelen die het u biedt.


Pepperl+Fuchs B.V.
Pettelaarpark 104
5216 PR 's-Hertogenbosch
Nederland
sales@nl.pepperl-fuchs.com
 +31 73 75 07 107
+31 73 75 07 107
sales-pa@nl.pepperl-fuchs.com
+31 73 75 07 108
Pepperl+Fuchs is een toonaangevend ontwikkelaar en producent van elektronische sensoren en componenten voor de wereldwijde automatiseringsmarkt. Continue innovatie, hoge kwaliteit en gestage groei zijn de basis van ons succes, al meer dan 70 jaar. Pepperl+Fuchs heeft wereldwijd 6300 medewerkers en productiefaciliteiten in Duitsland, de Verenigde Staten, Singapore, Hongarije, Indonesië en Vietnam, waarvan het merendeel ISO 9001 gecertificeerd.