

Automatisches Aufnehmen und Absetzen von Ladungsträgern
3-D-Daten für hochaufgelöste Erfassung bei der Übergabe
Die Anwendung
Autonome Transportfahrzeuge (AGV, AMR) übernehmen zahlreiche Beförderungsaufgaben in der Intralogistik. Das Transportgut ist häufig auf Paletten oder anderen standardisierten Ladungsträgern platziert. Die Paletten werden von den autonomen Fahrzeugen vollautomatisch aufgenommen und abgesetzt. Das kann an festen Übergabestationen oder an beliebigen Lagerpositionen geschehen. Es kommt auch vor, dass Paletten übereinandergestapelt sind und jeweils die oberste aufgenommen wird.
Das Ziel
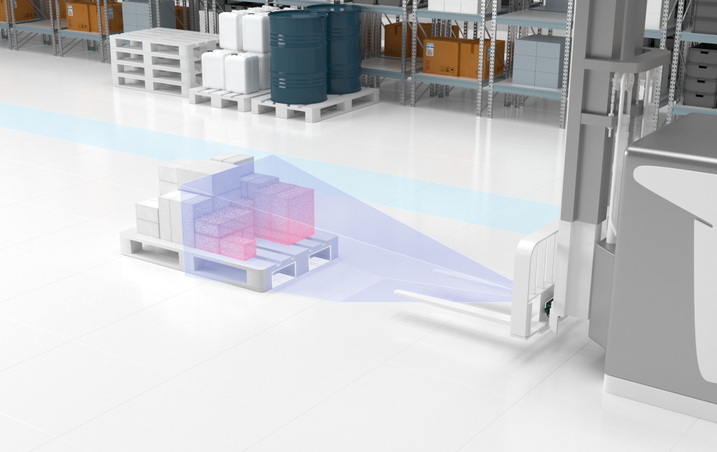
Beim Beladen muss die Position der Palette erkannt werden, um das Fahrzeug korrekt unter die Palette zu bewegen beziehungsweise seine Gabelzinken in die Palettentaschen zu manövrieren. Dabei darf die Palette nicht verschoben werden. Beim Absetzen muss erkannt werden, ob die Palette von der Gabel gelöst ist.
Die Lösung

SmartRunner Explorer 3-D
Der Vision-Sensor SmartRunner Explorer 3-D wird am Hubmast oder zwischen den Gabelzinken des Fahrzeugs montiert. Sein Erfassungsbereich ist auf den Ladungsträger gerichtet. Bei der Annäherung an die Palette und während des Auf- und Abladevorgangs liefert der Sensor mithilfe des Laufzeitverfahrens (Time of Flight, ToF) Messdaten im Format einer 3-D-Punktewolke, die den Zielbereich mit 307.200 Bildpunkten sehr hoch aufgelöst abbildet. Die Fahrzeugsteuerung erhält damit die Grundlage für die Feinjustierung des Vorgangs.
Technische Features
- Laserklasse 1 für Augensicherheit
- Betriebsfrequenz bis 30 Hz
- Schnittstelle Gigabit-Ethernet TCP/IP
- Kompakte Abmessungen (165 × 67 × 56 mm)
- Unterdrückung von Fremdlicht > 100 klx
- Rohbildgröße 640 × 480 Pixel

Die Vorteile

Details des SmartRunner Explorer 3-D
Der SmartRunner Explorer 3-D ermöglicht eine zuverlässige Lösung für die Steuerung von Be- und Entladevorgängen. Das kompakte Gerät findet in sehr engen Verhältnissen Platz. Mit seiner hohen Messrate von 30 Hz liefert er auch in schnellen Abläufen zuverlässige Daten. Gleichzeitig zeichnet er sich durch seine ressourcenschonende Messdatenverarbeitung aus. Zum Scannen nutzt er Infrarotlicht der Wellenlänge 940 nm. Damit ist er besonders unempfindlich gegenüber Fremdlicht und somit für den Außenbereich geeignet.
Auf einen Blick
- Hochaufgelöste 3-D-Abbildung des Zielobjekts liefert zuverlässige Datengrundlage an die Fahrzeugsteuerung
- Hohe Messrate für zuverlässige Detektion auch in schnellen Prozessen
- Zuverlässige Lösung für Be- und Entladung
- Ressourcenschonende Messdatenverarbeitung

Erhalten Sie mehr Informationen über den SmartRunner Explorer 3-D mit Stereo-Vision- und Time-of-Flight-Technologie.

Fahrerlose Transportfahrzeuge (FTF) sind aus der modernen Lager- und Fördertechnik nicht mehr wegzudenken. Entdecken Sie unsere Sensoren und Lösungen für Lasthandling, Navigation und Spurführung und Umgebungserfassung.


Pepperl+Fuchs AG
Längfeldweg 116
2504 Biel/Bienne
Schweiz
info@ch.pepperl-fuchs.com
 +41 32 374 76 76
+41 32 374 76 76
Pepperl+Fuchs ist einer der Marktführer in Entwicklung und Herstellung von elektronischen Sensoren und Komponenten für den weltweiten Automatisierungsmarkt. Kontinuierliche Innovation, hohes Qualitätsniveau und ständiges Wachstum bilden die Basis unseres Erfolges, seit mehr als 70 Jahren. Pepperl+Fuchs hat weltweit 6.300 Mitarbeiter und Produktionsstandorte in Deutschland, den USA, Singapur, Ungarn, Indonesien und Vietnam, die mehrheitlich nach ISO 9001 zertifiziert sind.