

Kollisionsvermeidung von FTF bei jeder Witterung
Radarsensor mit integrierter CAN-Schnittstelle für fahrerlose Transportfahrzeuge
Die Anwendung
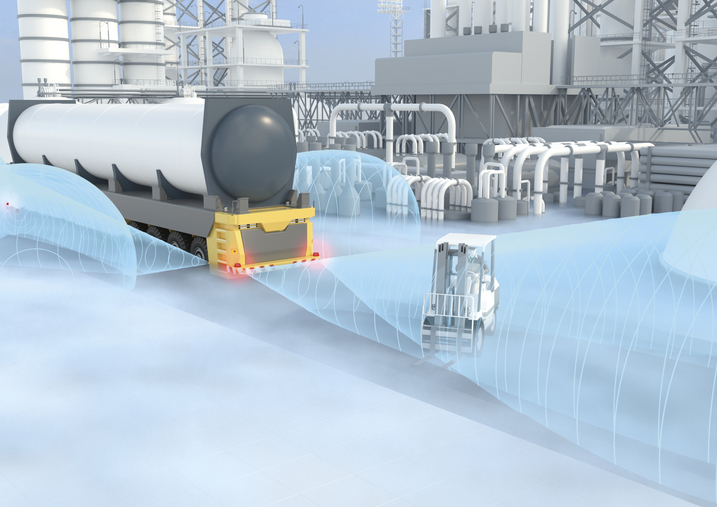
In der chemischen Industrie kommen an vielerlei Stellen fahrerlose Transportfahrzeuge (FTF) auf dem Betriebsgelände zum Einsatz. Die Fahrwege werden jedoch auch von anderen Fahrzeugen genutzt. Wenn sich die FTF in unübersichtlichem Gelände bei jeder Witterung bewegen, muss dennoch jederzeit gewährleistet sein, dass sie bei ihren Aufgaben nach vorne und hinten (optional auch seitlich) Kollisionen mit anderen Fahrzeugen oder Objekten, die sich im Fahrweg befinden können vermeiden.
Das Ziel
Das Fahrzeug muss vor einer drohenden Kollision sicher gestoppt und ggf. eine Routenkorrektur durchgeführt werden. Damit dies möglich ist, müssen Sensoren den Fahrweg auf großer Distanz überwachen. Sofern ein Hindernis entdeckt wird, leitet der Sensor ein entsprechendes Signal an die Steuereinheit weiter und das FTF wird abgebremst.
Hinzu kommt, dass die eingesetzte Sensorik eine Objekterkennung in einer schwierigen Umgebung sicherstellen muss. In der chemischen Industrie steigt häufig Dampf aus der Kanalisation auf. Etwaige Objekte müssen durch diesen Dampf erkannt werden, damit das FTF die Kollision vermeiden kann. Solche äußeren Bedingungen stellen für optoelektronische Sensoren eine Herausforderung dar, die mittels Radartechnologie leicht umgangen werden kann. Radarsensoren widerstehen schwierigen Witterungen und funktionieren auch bei Verschmutzung, Feuchtigkeit, Nebel oder anderen Störeinflüssen zuverlässig.
Je nach Gefahrensituation muss die Absicherung ein gewisses Performance Level (PL) oder Safety Integrity Level (SIL) erfüllen. Erforderlich ist dafür eine absolut zuverlässige Detektion beziehungsweise Abstandsmessung im betreffenden Bereich. Die Anwendung sollte deshalb ein Performance Level c (PL c) erreichen.
Die Lösung
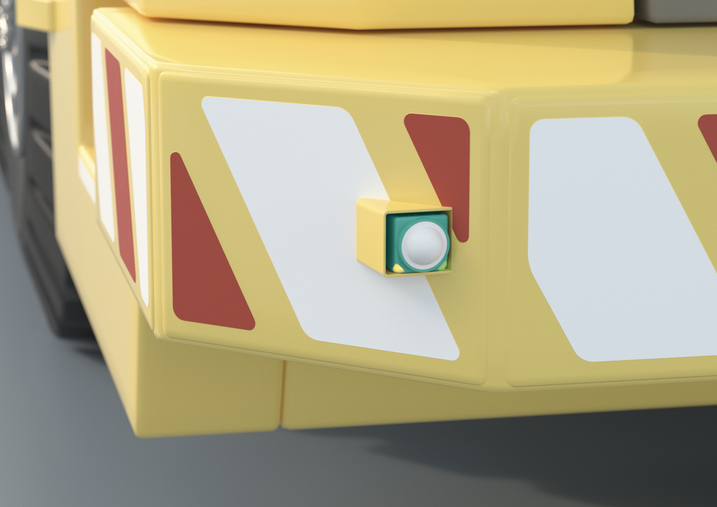
FMCW-Radarsensoren sind perfekt geeignet, um eine optimale Überwachung der Hauptfahrtrichtungen auch in dieser schwierigen Umgebung zu gewährleisten. Unabhängig von der Witterung oder anderen äußeren Einflüssen, messen die Sensoren der Serie MWC25M-L2M-* zuverlässig auf natürliche Objekte und erkennen so potenzielle Kollisionen im Voraus.
Der Erfassungsbereich kann dank Vorder- und Hintergrundausblendung an die Umgebung angepasst werden. Außerdem kann je nach Anwendung zwischen insgesamt drei Messbetriebsarten umgeschaltet werden. Für die Kollisionsvermeidung in FTF kommt der Modus „erstes Objekt“ zum Einsatz, bei dem immer das Objekt erfasst wird, welches sich am nächsten zum Sensor befindet. Durch die hohe Abtastrate von bis zu 200 Hz kann die Distanz zu Objekten im field of view (FoV) sowie deren relative Geschwindigkeit zuverlässig gemessen werden.
Je nach gefordertem Performance oder Safety Integrity Level können die Radarsensoren der Serie MWC*-L2M-B16 einfach oder redundant genutzt werden. Ein maßgeschneidertes Safety-Konzept in Kombination mit einer diagnosefähigen Steuerung bestätigt hierbei die Eignung der Sensoren für sicherheitsrelevante Applikationen und erleichtert dem Anwender den entsprechenden Nachweis.
Technische Features
- Messbereich 0,5 - 25 m
- Arbeitsfrequenz 122,25 ... 123 GHz
- Schutzart: IP68/IP69
- Blindbereich 0 - 0,5 m
- Temperaturbereich -40 … +70 °C
- Erweiterte EMV, vergleichbar mit E1-Level und -Impulsen
Die Vorteile

Die integrierte CAN-Schnittstelle der Serie erlaubt die einfache Integration in das CANopen-Bussystem des Fahrzeugs. Darüber hinaus werden Statusinformationen über den Sensor zur Verfügung gestellt, z. B. den „producer heartbeat“ und die Validität des gemessenen Abstandswertes. Mit diesen Daten kann in einer sicheren Steuerung überprüft werden, ob der Sensor korrekt arbeitet. Damit ist es möglich, ein Performance Level c (PL c) Kat. 2 zu erreichen und so die Anwendung sicher zu lösen, auch bei Nachrüstungen. Die Parametrierung erfolgt dabei einfach via CANopen-Parametriersoftware sowie PACTware DTM.
Auf einen Blick
- Integrierte CAN-Schnittstelle
- Performance Level c (PL c)
- Kollisionsvermeidung von FTF nach vorne und hinten
- Radartechnologie eignet sich besonders für schwierige Witterungsbedingungen

Industrielle Radarsensoren von Pepperl+Fuchs ermöglichen Ihnen eine störungsfreie Distanz- und Geschwindigkeitsmessung – selbst bei Regen, Nebel, Wind oder Staub. Erfahren Sie mehr über dieses einzigartige sensorische Funktionsprinzip und all die Vorteile, die es Ihnen eröffnet.


Pepperl+Fuchs AG
Längfeldweg 116
2504 Biel/Bienne
Schweiz
info@ch.pepperl-fuchs.com
 +41 32 374 76 76
+41 32 374 76 76
Pepperl+Fuchs ist einer der Marktführer in Entwicklung und Herstellung von elektronischen Sensoren und Komponenten für den weltweiten Automatisierungsmarkt. Kontinuierliche Innovation, hohes Qualitätsniveau und ständiges Wachstum bilden die Basis unseres Erfolges, seit mehr als 70 Jahren. Pepperl+Fuchs hat weltweit 6.300 Mitarbeiter und Produktionsstandorte in Deutschland, den USA, Singapur, Ungarn, Indonesien und Vietnam, die mehrheitlich nach ISO 9001 zertifiziert sind.