

Effiziente Navigation fahrerloser Transportfahrzeuge: Neue PGV-Positioniersysteme mit TCP/IP und EtherCAT®

Pepperl+Fuchs bietet nun auch Varianten des Positioniersystems PGV mit integrierter TCP/IP oder EtherCAT®-Schnittstelle an.
Vor allem in der Intralogistik, aber auch in zahlreichen anderen Industriebereichen, kommen fahrerlose Transportfahrzeuge (FTF) zum Einsatz, um Güter von A nach B zu transportieren. Damit diese stets sicher an ihr Ziel gelangen, bedarf es zuverlässiger Positioniersysteme.
Die Variante F213 des PGV (Position Guided Vision) mit integrierter TCP/IP-Schnittstelle ist speziell auf die kamerabasierte Spurführung sogenannter Bots und kleiner FTF ausgelegt. Die besonders kompakte Bauform ist ideal für die Anforderungen beengter Bauräume geeignet und lässt sich platzsparend installieren. So fügt sich der PGV*F213*-Lesekopf mit seiner Konstruktionstiefe von gerade einmal 35 mm perfekt in schlanke Fahrzeuge ein und stellt eine besonders wirtschaftliche Lösung dar.
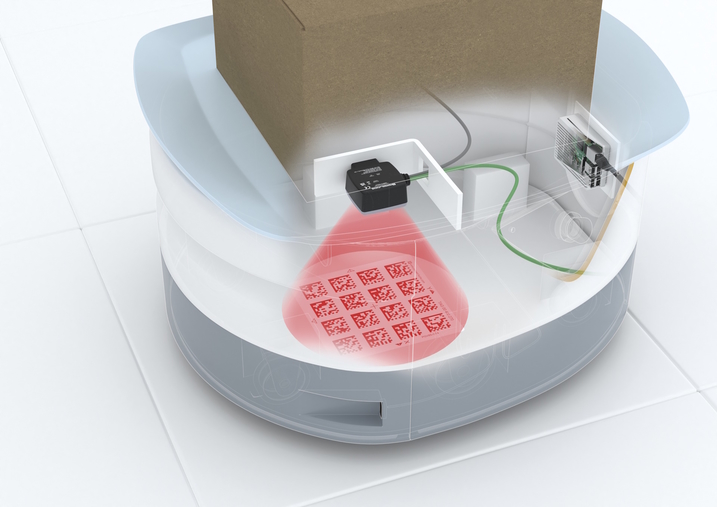
Wie alle PGV-Leseköpfe besteht auch der PGV*F213* aus einem Kamerasystem mit integrierter Beleuchtungseinheit. Die schlanke Lesekopfvariante verwendet Rotlicht und verfolgt DataMatrix-Codes und -Tags auf dem Boden. Die Codes erhalten Anwender entweder als selbstklebendes Codeband oder – für besonders anspruchsvolle Umgebungen – auf robusten Metallcodeleisten.
Direktanbindung an PC über TCP/IP-Schnittstelle

Die platzsparende Variante des PGV ist mit einer integrierten TCP/IP-Schnittstelle erhältlich. Während zur Konfiguration des Lesekopfs bisher die Anbindung an eine Steuerung notwendig war, können Anwender das Positioniersystem PGV*F213* nun direkt mit einem PC oder sogar mit einem Einplatinencomputer verbinden. Dadurch kann zum einen die Inbetriebnahme schnell und einfach erfolgen. Zum anderen entfällt der Bedarf einer kostenintensiven Steuerung für die Navigation von FTF. Vor allem in Anwendungen, in denen viele Bots zum Einsatz kommen, bietet das kompakte PGV so einen entscheidenden Vorteil in Sachen Wirtschaftlichkeit.
Echtzeitpositionierung für schnellen FTF-Verkehr
In großen Lagern sind häufig zahlreiche FTF und Bots gleichzeitig im Einsatz. Um dabei Kollisionen zu vermeiden, müssen die Routen der Fahrzeuge perfekt aufeinander abgestimmt und in Echtzeit zuverlässig überwacht werden. Nur so ist gewährleistet, dass sich die FTF mit wenigen Zentimetern Abstand gleichzeitig und in voller Geschwindigkeit fortbewegen können. Das PGV*F213* ermöglicht durch einen Synchronisationspuls und Zeitstempel auf 2-D-Bildaufnahmen die hochgenaue Synchronisation zwischen der Steuerung der einzelnen Bots und der übergeordneten Leitsteuerung.

Besonders schnell: PGV F200 jetzt auch mit EtherCAT®

Die ideale Lösung: PGV*F200*
Für Anwender, die ihre FTF nicht nur über DataMatrix-Codes und -Tags, sondern auch auf Farb- und Spurbändern navigieren möchten, ist das PGV*F200* die ideale Lösung. Der Allrounder im PGV-Portfolio kann alle verfügbaren Positioniermarkierungen flexibel lesen – einzeln oder auch in Kombination. Für höchstmögliche Flexibilität steht diese PGV-Variante mit einer großen Auswahl an integrierten Schnittstellen zur Verfügung. Dazu gehören unter anderem CANopen, EtherNet/IP, PROFIBUS, PROFINet und RS485. Neu im Portfolio ist ab sofort das PGV*F200* mit integrierter EtherCAT®-Schnittstelle. Die Datenübertragung des PGV-Lesekopfs an die Steuerung erfolgt darüber zuverlässig in Echtzeit. Neben den Positionswerten umfassen die Daten unter anderem auch Aussagen über den aktuellen Zustand des DataMatrix-Codebands. Damit steht das PGV*F200* mit EtherCAT für höchste Prozesssicherheit.
Highlights des Positioniersystems PGV*F213*
- Positioniersystem mit TCP/IP-Schnittstelle zur kamerabasierten Spurführung kleiner Bots und FTF
- Besonders kompakter Lesekopf mit 35 mm Konstruktionstiefe für beengte Einbausituationen
- Einfache und schnelle Konfiguration via (Einplatinen-) PC ohne übergeordnete Steuerung
Highlights des Positioniersystems PGV*F200*
- Allrounder für alle verfügbaren Positioniermarkierungen: DataMatrix-Codes und -Tags, Farb- und Spurbänder
- Große Auswahl an integrierten Schnittstellen für größte Flexibilität
- EtherCAT-Schnittstelle erlaubt Datenübertragung in Echtzeit und höchste Prozesssicherheit


Pepperl+Fuchs Gesellschaft m.b.H.
Energiestrasse 2
A-2540 Bad Vöslau
Österreich
info@at.pepperl-fuchs.com
 +43 2236 33441
+43 2236 33441
Pepperl+Fuchs ist einer der Marktführer in Entwicklung und Herstellung von elektronischen Sensoren und Komponenten für den weltweiten Automatisierungsmarkt. Kontinuierliche Innovation, hohes Qualitätsniveau und ständiges Wachstum bilden die Basis unseres Erfolges, seit mehr als 70 Jahren. Pepperl+Fuchs hat weltweit 6.300 Mitarbeiter und Produktionsstandorte in Deutschland, den USA, Singapur, Ungarn, Indonesien und Vietnam, die mehrheitlich nach ISO 9001 zertifiziert sind.