

Automatic Loading and Unloading of Load Carriers
3-D Data for High-Resolution Detection during Transfer
The Application
Automated guided vehicles (AGVs, AMRs) perform numerous transport tasks in intralogistics. Transported goods are often placed on pallets or other standardized load carriers. The pallets are picked up and put down fully automatically by the autonomous vehicles. This can be done at fixed transfer stations or at any storage position. It is also possible to stack pallets on top of each other and pick up the top layer.
The Goal
During loading, the position of the pallet must be detected to move the vehicle under the pallet correctly or to maneuver its fork arms into the pallet openings. The pallet must not be moved during this process. When unloading the pallet, it is necessary to detect whether the pallet has become detached from the fork.
The Solution

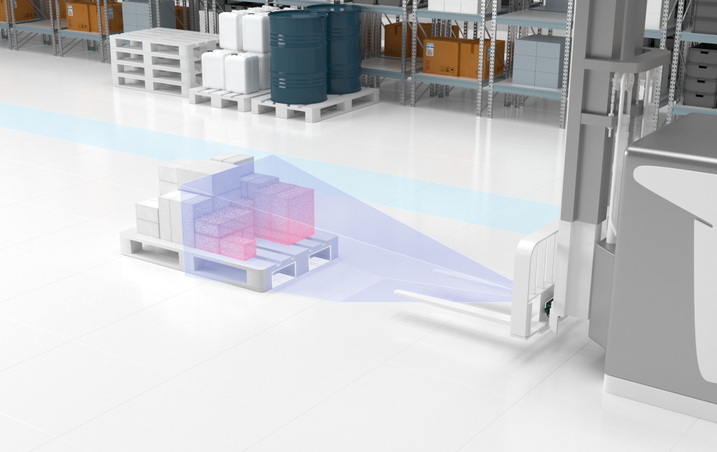
SmartRunner Explorer 3-D
The SmartRunner Explorer 3-D vision sensor is mounted on the mast or between the vehicle’s fork arms. Its sensing range is directed toward the load carrier. When approaching the pallet and during the loading and unloading process, the sensor uses the time-of-flight (ToF) technology to provide measurement data in the form of a 3-D point cloud, which the target area displays at a very high resolution of 307,200 pixels. The vehicle controller therefore receives the information that allows the process to be finely adjusted.
Technical Features
- Laser class 1 for eye safety
- Operating frequency up to 30 Hz
- Gigabit Ethernet TCP/IP interface
- Compact dimensions (165 × 67 × 56 mm)
- Suppression of ambient light > 100 klx
- Raw image size 640 × 480 pixels

The Benefits

Details of the SmartRunner Explorer 3-D
The SmartRunner Explorer 3-D provides a reliable solution for controlling loading and unloading operations. The compact device fits in very tight spaces. With its high measuring rate of 30 Hz, it delivers reliable data even in quick processes. At the same time, it is characterized by its resource-saving measurement data processing. It scans using infrared light with a wavelength of 940 nanometers. This makes it especially resistant to ambient light and therefore suitable for outdoor use.
At a Glance
- High-resolution 3-D imaging of the target object provides a reliable range of data for the vehicle controller
- High measuring rate for reliable detection even in quick processes
- Reliable solution for loading and unloading
- Resource-saving measurement data processing

Get more information about the SmartRunner Explorer 3-D with stereo vision and time-of-flight technology.

Automated guided vehicles have become an indispensable part of modern material handling. Discover our sensors and solutions for load handling, navigation and guidance, and environment perception.


Pepperl+Fuchs A/S
Kirkebjerg Allé 90
DK-2605 Brøndby
Denmark
info@dk.pepperl-fuchs.com
 +45 7010 4210
+45 7010 4210
Pepperl+Fuchs er markedsledende indenfor udvikling og fabrikation af elektroniske sensorer og komponenter til det globale automatiseringsmarked. Kontinuerlig innovation, kombineret med høj kvalitet og stabil vækst har sikret uafbrudt succes gennem mere end 70 år. Pepperl+Fuchs har 6.300 ansatte på verdensplan og har produktionsfaciliteter i Tyskland, USA, Singapore, Ungarn, Indonesien og Vietnam; de fleste ISO 9001 certificerede.