
Serviceline Industrial Sensors
Phone: 330-486-0001
Fax: 330-405-4710
Serviceline Explosion Protection
Phone: 330-486-0002
Fax: 330-963-5827

Serviceline Industrial Sensors
Phone: 330-486-0001
Fax: 330-405-4710
Serviceline Explosion Protection
Phone: 330-486-0002
Fax: 330-963-5827
Serviceline Industrial Sensors
Phone: 330-486-0001
Fax: 330-405-4710
Serviceline Explosion Protection
Phone: 330-486-0002
Fax: 330-963-5827

Universal Interfaces for the Simple Implementation of Vision Applications
2024-10-10

The output of raw data offers a wide range of possibilities for implementing individual vision applications. At the same time, the effort required to evaluate this data conventionally is relatively high. For this reason, Pepperl+Fuchs has now equipped the SmartRunner Explorer laser profile sensor and the SmartRunner Explorer 3-D vision sensor with the manufacturer-independent GenICam and ROS interfaces. This enables universal access to data and parameters as well as to a variety of programming modules in software libraries. This saves users time and money when implementing industrial vision applications.
Standardized Data and Access to Image Processing Libraries with GenICam
Every vision sensor is different. For this reason, users often have to familiarize themselves with the data structures of proprietary systems before they can evaluate the raw data. To minimize this effort, the universal programming interface GenICam was developed. This standard from the European Machine Vision Association (EMVA) brings the product-specific data and parameters into a generic structure and enables standardized editing and processing.
GenICam can also be used to connect the SmartRunner Explorer and SmartRunner Explorer 3-D to image processing libraries such as HALCON. Image processing applications can be implemented quickly and easily using the ready-made programming modules available there. As GenICam allows the same framework to be used for different sensors, new devices can be easily integrated into existing applications.
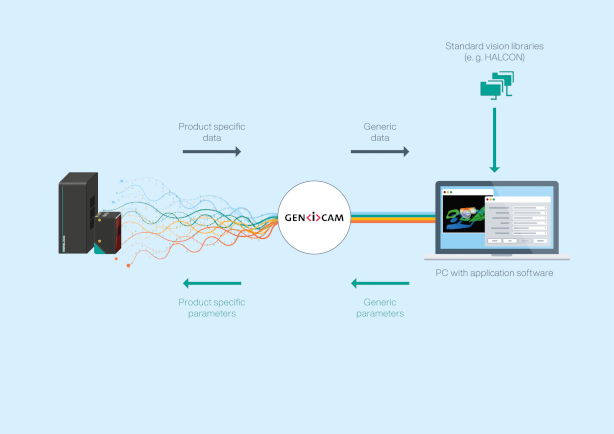
The GenICam standard brings product-specific data into a generic structure and allows access to programming modules in image processing libraries.
Complex Robotics Applications and Simple Proof of Concepts with ROS
From pick-and-place applications to quality control and collision avoidance: The SmartRunner Explorer laser profile sensor and the SmartRunner Explorer 3-D vision sensor take on demanding tasks on production robots or Automated Guided Vehicles (AGVs). These applications are usually complex and costly to implement. Various interfaces and a large number of suppliers for sensors and actuators make implementation even more difficult.
This is where the open-source Robot Operating System (ROS) framework comes to the rescue: it comprises a range of software libraries, tools, and programs that are available as open-source software. This allows applications to be implemented quickly and easily on PCs or industrial PCs.
ROS also offers advantages for applications beyond robotics. For example, the open-source tools can be used to carry out cost-effective proof of concepts that can be used as a basis for investment decisions.
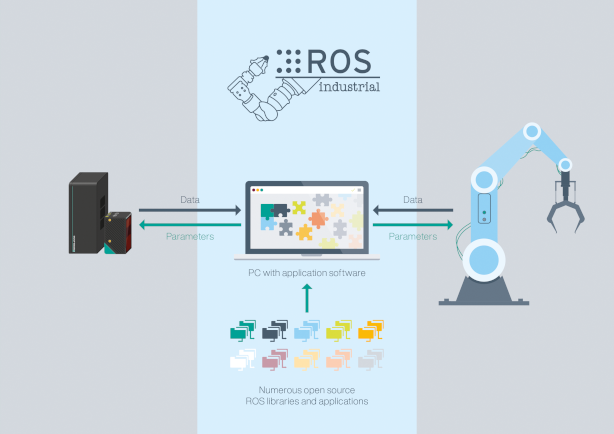
ROS gives users access to a wide range of open-source tools that can be used to implement applications easily and cost-effectively.
The Advantages of Universal Interfaces at a Glance
- Time and cost savings through access to programming modules in image processing libraries
- Quick and easy proof of concept for new applications
- Manufacturer-independent integration of vision sensors
- No familiarization with manufacturer-specific interfaces required

Get more information about the SmartRunner Explorer 3-D with stereo vision and time-of-flight technology.

Discover the SmartRunner laser profile sensors equipped with a unique combination of light section technology and a 2-D vision sensor with integrated LEDs …


Pepperl+Fuchs Inc.
1600 Enterprise Parkway
Twinsburg, OH 44087
USA
- responsible for Canada -
sales@us.pepperl-fuchs.com
 +1 330 425-3555
+1 330 425-3555
© 2025 All Rights Reserved.
Pepperl+Fuchs is a leading developer and manufacturer of electronic sensors and components for the global automation market. Continuous innovation, enduring quality, and steady growth have been the foundation of our success for more than 70 years. Pepperl+Fuchs employs 6,300 people worldwide and has manufacturing facilities in Germany, USA, Singapore, Hungary, Indonesia and Vietnam, most of them ISO 9001 certified.