| Accesorio de |

|
|
|
| PROFINET and Modbus IO-Link master with 4 x IO-Link Class A and 4 x IO-Link Class B portsfa |
|

|
|
|
| Ethernet IO-Link master with PROFINET S2 redundancyfa |
|

|
|
|
| Ethernet IO-Link module with 4x Class A and 4x Class B IO-Link portsfa |
|
|
|
|
|
| Ethernet IO-Link module with eight IO-Link portsfa |
|

|
|
|
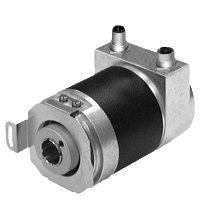
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con Powerlink, 30 Bit Multivuelta, Dos conectores Ethernet con concentrador integrado, Eje hueco insertable, Tipo de carcasa: 58 mm, Versión de eje: Eje hueco insertable, Interfaz: Ethernet POWERLINK, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: Ethernet Powerlink, Físico: Ethernet, Protocolo l: Powerlink protocolo estándarfa |
|
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con Powerlink, 16 Bit Unavuelta, Dos conectores Ethernet con concentrador integrado, Eje hueco insertable, Tipo de carcasa: 58 mm, Versión de eje: Eje hueco insertable, Interfaz: Ethernet POWERLINK, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: Ethernet Powerlink, Físico: Ethernet, Protocolo l: Powerlink protocolo estándarfa |
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con TCP/IP, 16 Bit Unavuelta, Servidor de Web integrado, Eje hueco insertable, Tipo de carcasa: 58 mm, Versión de eje: Eje hueco insertable, Interfaz: Ethernet TCP/IP, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: TCP/IP, Físico: Ethernetfa |
|
|
|
|
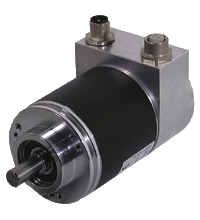
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con TCP/IP, 30 Bit Multivuelta, Servidor de Web integrado, Brida servo o brida de sujeción, Tipo de carcasa: 58 mm, Versión de eje: Eje macizo, Interfaz: Ethernet TCP/IP, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: TCP/IP, Físico: Ethernetfa |
|
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con TCP/IP, 16 Bit Unavuelta, Servidor de Web integrado, Brida servo o brida de sujeción, Tipo de carcasa: 58 mm, Versión de eje: Eje macizo, Interfaz: Ethernet TCP/IP, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: TCP/IP, Físico: Ethernetfa |
|
|
|
|
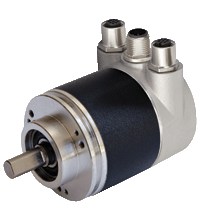
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con Powerlink, 16 Bit Unavuelta, Dos conectores Ethernet con concentrador integrado, Brida servo o brida de sujeción, Tipo de carcasa: 58 mm, Versión de eje: Eje macizo, Interfaz: Ethernet POWERLINK, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: Ethernet Powerlink, Físico: Ethernet, Protocolo l: Powerlink protocolo estándarfa |
|
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con Powerlink, 30 Bit Multivuelta, Dos conectores Ethernet con concentrador integrado, Brida servo o brida de sujeción, Tipo de carcasa: 58 mm, Versión de eje: Eje macizo, Interfaz: Ethernet POWERLINK, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: Ethernet Powerlink, Físico: Ethernet, Protocolo l: Powerlink protocolo estándarfa |
|

|
|
|
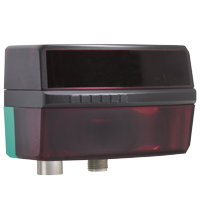
| R2000 UHD, sensor LiDAR 2D para posicionamiento preciso y altamente dinámico, rango de medición al objeto de hasta 60 m, Ethernet, Gran alcance , Resolución angular muy alta, Luz infrarroja, Procedimiento de medición impulso-tiempo de funcionamiento-medición, Filtro de datos medidos flexiblefa |
|
|
|
|
|
| R2000 UHD, sensor LiDAR 2D para posicionamiento preciso y altamente dinámico, rango de medición al objeto de hasta 60 m, Ethernet, Gran alcance , Resolución angular muy alta, Luz infrarroja, Aplicaciones de ultracongelación, Procedimiento de medición impulso-tiempo de funcionamiento-mediciónfa |
|
|
|
|
| R2300, sensor LiDAR 2D para detección y posicionamiento de objetos, rango de medición al objeto de hasta 10 m, Ethernet, Resolución angular alta, Ajustable mediante láser piloto integrado, Procedimiento de medición impulso-tiempo de funcionamiento-medición, Construcción compacta, Alta tolerancia a la contaminaciónfa |
|
|
|
|
|
| R2300, sensor LiDAR 3D para detección y posicionamiento de objetos, rango de medición al objeto de hasta 10 m, Ethernet, Resolución angular alta, Ajustable mediante láser piloto integrado, Procedimiento de medición impulso-tiempo de funcionamiento-medición, Construcción compacta, Alta tolerancia a la contaminaciónfa |
|
|
|
|
|
| R2000 SD, sensor LiDAR 2D para tareas de medición y posicionamiento sencillos, rango de medición al objeto de hasta 25 m, Ethernet, Gran alcance , Resolución angular alta, Luz infrarroja, Procedimiento de medición impulso-tiempo de funcionamiento-mediciónfa |
|
|
|
|
|
| Detección R2000, sensor LiDAR 2D para monitorización de campo precisa, rango de medición al objeto de hasta 60 m, 4 campos de supervisión totalmente programables, 4 entradas/salidas (seleccionables), Gran alcance , Resolución angular alta, Ángulo de medición de 360°fa |
|
|
|
|
|
| R2000 UHD, sensor LiDAR 2D para posicionamiento preciso y altamente dinámico, rango de medición al objeto de hasta 10 m, Ethernet, Resolución angular muy alta, Emisor de luz de láser rojo, Procedimiento de medición impulso-tiempo de funcionamiento-medición, Filtro de datos medidos flexiblefa |
|
|
|
|
|
| R2000 HD, sensor LiDAR 2D para tareas de medición y posicionamiento sencillos, rango de medición al objeto de hasta 12 m, Ethernet, Rango operativo medio, Resolución angular alta, Luz infrarroja, Procedimiento de medición impulso-tiempo de funcionamiento-mediciónfa |
|
|
|
|
|
| R2000 HD, sensor LiDAR 2D para tareas de medición y posicionamiento precisos, rango de medición al objeto de hasta 30 m, Ethernet, Gran alcance , Resolución angular alta, Luz infrarroja, Procedimiento de medición impulso-tiempo de funcionamiento-medición, Filtro de datos medidos flexiblefa |
|
|
|
|
|
| R2000 UHD, sensor LiDAR 2D para posicionamiento preciso y altamente dinámico, rango de medición al objeto de hasta 30 m, Ethernet, Gran alcance , Resolución angular muy alta, Luz infrarroja, Aplicaciones de ultracongelación, Procedimiento de medición impulso-tiempo de funcionamiento-mediciónfa |
|
|
|
|
|
| R2000 UHD, sensor LiDAR 2D para posicionamiento preciso y altamente dinámico, rango de medición al objeto de hasta 30 m, Ethernet, Gran alcance , Resolución angular muy alta, Luz infrarroja, Procedimiento de medición impulso-tiempo de funcionamiento-medición, Filtro de datos medidos flexiblefa |
|
|
|
|
|
| Detección R2000, sensor LiDAR 2-D para monitorización de campo precisa, rango de medición al objeto de hasta 30 m con 3 conectores M12 x 1, 4 campos de supervisión totalmente programables, 4 entradas/salidas (seleccionables), Gran alcance , Resolución angular alta, Ángulo de medición de 360°fa |
|
|
|
|
|
| Detección R2000, sensor LiDAR 2-D para monitorización de campo precisa, rango de medición al objeto de hasta 30 m con 3 conectores M12 x 1, 4 campos de supervisión totalmente programables, 4 entradas/salidas (seleccionables), Gran alcance , Resolución angular alta, Aplicaciones de ultracongelaciónfa |
|
|
|
|
|
| Detección R2000, sensor LiDAR 2D para monitorización de campo precisa, rango de medición al objeto de hasta 30 m, 4 campos de supervisión totalmente programables, 4 entradas/salidas (seleccionables), Gran alcance , Ángulo de medición de 360°, Procedimiento de medición impulso-tiempo de funcionamiento-mediciónfa |
|
|
|
|
|
| Detección R2000, sensor LiDAR 2D para monitorización de campo precisa, rango de medición al objeto de hasta 60 m, 4 campos de supervisión totalmente programables, 4 entradas/salidas (seleccionables), Gran alcance , Resolución angular alta, Ángulo de medición de 360°fa |
|
|
|
|
|
| Detección R2000, sensor LiDAR 2D para monitorización de campo precisa, rango de medición al objeto de hasta 10 m, 4 campos de supervisión totalmente programables, 4 entradas/salidas (seleccionables), Resolución angular alta, Ángulo de medición de 360°, Procedimiento de medición impulso-tiempo de funcionamiento-mediciónfa |
|
|
|
|
| Cable, PUR/PP, verde de 4 hilos, Cat5e, apantallado, homologación UL, apto para cadena de arrastrefa |
|
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con TCP/IP, 30 Bit Multivuelta, Servidor de Web integrado, Eje hueco insertable, Tipo de carcasa: 58 mm, Versión de eje: Eje hueco insertable, Interfaz: Ethernet TCP/IP, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: TCP/IP, Físico: Ethernetfa |
|
|
|
|
|
| EtherNet/IP and Modbus IO-Link master with 4 x IO-Link Class A and 4 x IO-Link Class B portsfa |
|

|
|
|
| Ethernet IO-Link module with 8 inputs/outputsfa |
|

|
|
|
| Ethernet IO module with 16 configurable digital inputs/outputs and integrated logicfa |
|
|
|
|
|
| Firmware variant from ICE3-8IOL-G65L-V1D with Modbus enabled by defaultfa |
|
|
|
|
|
| Ethernet IO-Link module with 8 inputs/outputsfa |
|
|
|
|
|
| Ethernet IO module with 8 digital inputs/outputsfa |
|
|
|
|
|
| Ethernet IO module with 8 digital inputs/outputs and a control functionfa |
|
|
|
|
|
| Ethernet IO module with 16 digital inputsfa |
|
|
|
|
|
| EtherNet/IP IO-Link master with 8 inputs/outputsfa |
|
|
|
|
|
| PROFINET IO IO-Link master with 8 inputs/outputsfa |
|

|
|
|
| Ethernet IO module with 16 configurable digital inputs/outputsfa |
|










 +52 55 5636-0970
+52 55 5636-0970