

Configuration et applications possibles des détecteurs radars
Détection fiable dans des conditions défavorables
Même dans les conditions les plus défavorables, les détecteurs radars industriels de Pepperl+Fuchs fournissent des résultats de mesure fiables. Qu'il s'agisse de pluie, de brouillard, de vent ou de poussière, le principe de fonctionnement de l'onde électromagnétique est robuste vis-à-vis des conditions environnementales difficiles et hautement insensible aux variations de température. De plus, le boîtier VariKont L2 utilisé a un indice de protection IP68/69. Cette association d'un principe de fonctionnement à faible interférence et d'une conception de détecteur particulièrement robuste permet de couvrir une large gamme d'applications avec un seul type d'appareil, à condition qu'il soit configuré en conséquence. Trois modes de mesure différents sont disponibles à cet effet :
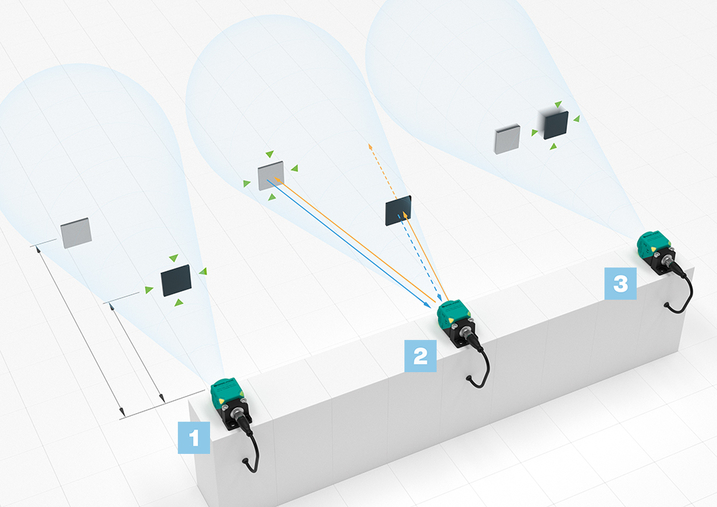
1. Premier objet : détection indépendante du matériau de l'objet le plus proche du détecteur radar
2. Meilleure réflexion : détection de l'objet avec les meilleures propriétés de réflexion, même à travers des objets interférents
3. Vitesse la plus rapide : détection de l'objet se rapprochant ou s'éloignant le plus rapidement du détecteur radar
Exemple : prévention des collisions et limitation de la vitesse maximale des chariots élévateurs

Grâce à la grande plage de détection des détecteurs radars industriels, diverses sections autour des chariots élévateurs peuvent être sécurisées de manière fiable. L'utilisation de plusieurs détecteurs radars sur un même véhicule est possible sans aucun problème, car les appareils n'ont aucune influence entre eux du fait de la modulation de fréquence utilisée, sans qu'un processus de synchronisation manuelle soit nécessaire. Afin d'obtenir une protection optimale des sections à surveiller, il est recommandé d'utiliser le mode de mesure « premier objet ». Dans ce mode de fonctionnement, l'objet le plus proche du détecteur est détecté, quel que soit le matériau. En fonction de la vitesse de déplacement et de la vitesse de réaction associée, une vitesse de balayage élevée est également nécessaire. Ceci peut être réglé via des paramètres jusqu'à un maximum de 200 Hz.
En outre, des détecteurs radars peuvent également être utilisés pour réduire efficacement la vitesse maximale des chariots élévateurs : Si une vitesse élevée est toujours avantageuse à l'extérieur et si l'environnement est généralement bien visible, une certaine restriction est nécessaire dans les usines et les entrepôts pour des raisons de sécurité. Un détecteur radar aligné verticalement, qui détecte le plafond du hall ou les entretoises métalliques situées en dessous, peut être utilisé pour déterminer immédiatement lorsque le chariot élévateur a atteint une zone intérieure. Si tel est le cas, la vitesse maximale possible est automatiquement limitée à un niveau tolérable et ne cesse de s'appliquer que lorsque le chariot élévateur quitte le hall. Le mode de mesure « premier objet » ou « meilleure réflexion » est recommandé. Une puissance de filtre élevée et une faible vitesse de balayage peuvent être définies pour éviter une réduction de vitesse indésirable sous des traverses ou des ponts en terrain ouvert.
Pénétration et suppression de matériaux
Les matériaux sans conductivité électrique élevée réfléchissent et transmettent les ondes électromagnétiques. Les réflexions se produisent ici à chaque transition (ce que l'on appelle saut de matière), dans les cas les plus fréquents, il s'agit de la transition de l'air à la matière et de la matière à l'air. Les pertes d'absorption des ondes radars se produisent à l'intérieur du matériau. Si ces pertes d'absorption sont plutôt faibles, comme c'est le cas avec certains plastiques, l'onde électromagnétique traverse le matériau sans pertes importantes et émerge de l'autre côté.
Exemple : pénétration de la couche externe du réservoir

Cette capacité de l'onde radar à traverser différents matériaux peut être mise à profit dans certaines applications. D'une part, elle peut être utilisée pour créer une conception de machine visuellement attrayante en dissimulant les détecteurs et en les protégeant des influences extérieures derrière une plaque en plastique. D'autre part, cette caractéristique peut être utilisée pour mesurer le niveau de remplissage dans des réservoirs fermés par exemple, sans avoir à percer ou à découper un trou dans la couche externe. Les conditions préalables de base ici sont que le milieu mesuré ait une réflectivité élevée et que les propriétés matérielles du réservoir ou le point par lequel le détecteur effectue les mesures permettent une bonne transmission de l'onde radar.
Les mesures doivent être effectuées dans le mode de fonctionnement « meilleure réflexion ». En raison des multiples transitions de l'air au matériau et inversement, les pertes (atténuation du matériau) peuvent également conduire à de légères modifications de la valeur mesurée, qui restent cependant constantes dans l'application si les propriétés du matériau restent les mêmes. Si le niveau dans la plage de détection du détecteur est limité, la distance minimale jusqu'à la surface du support doit être supprimée par une suppression du premier plan et la distance maximale du détecteur au sol par une suppression de l'arrière-plan.
Réflecteurs d'angle comme cibles de référence et pour augmenter la réflexion
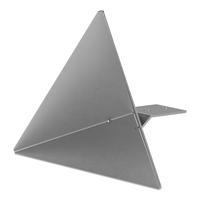
Les réflecteurs d'angle se composent de trois triangles métalliques isocèles connectés entre eux. En raison de leur réflectivité élevée, même avec des déviations angulaires par rapport au détecteur, ils sont souvent utilisés comme cibles de référence pour la détermination optimale de la portée. Si un réflecteur d'angle est fixé à un objet faiblement réfléchissant ou qui n'est pas parfaitement aligné avec le détecteur radar, sa surface réfléchissante augmente considérablement. Il est ainsi facile de stabiliser les mesures sur l'objet cible souhaité et d'optimiser diverses applications selon les besoins.
Exemple : mesure de distance dans le bras de la grue

Un exemple d'application pour l'utilisation efficace des réflecteurs d'angle est le support efficace pour le contrôle précis des flèches de grues mobiles. Le faisceau radar d'un détecteur radar monté à l'intérieur de la flèche principale est dirigé vers un réflecteur d'angle situé à l'extrémité de la flèche télescopique hydraulique. Si le bras télescopique se déplace vers l'avant ou l'arrière lorsque la flèche est déployée ou rétractée, le détecteur mesure le changement de distance et transmet les valeurs au système de commande de la grue, afin qu'elles servent de base lors d'autres processus d'ajustement. Comme les dépôts de saleté et les résidus d'huiles hydrauliques rendent la mesure difficile, le mode de mesure « meilleure réflexion » est utilisé pour mesurer le réflecteur d'angle comme un objet cible défini, car il fournit une amplitude de réflexion constante et stable à tout moment.
Cependant, il est également important de vérifier les autres réflexions dans la plage de détection du détecteur. Ceci peut être évalué en enregistrant jusqu'à dix réflexions dans un cycle de mesure (valeurs de distance avec amplitude de réflexion) à l'aide de la « liste des réseaux de réflexions ». L'alignement du détecteur sur la cible de référence est ici essentiel pour obtenir un signal stable via le mode de fonctionnement défini. Idéalement, la suppression du premier plan doit également être réglée sur la distance minimale entre le détecteur et le réflecteur afin d'éviter les mauvaises réflexions.
Astuces Pepperl+Fuchs : mise en service des détecteurs radars
Dans cette vidéo, vous apprendrez pas à pas comment intégrer et paramétrer les détecteurs radar de Pepperl+Fuchs au sein d'un outil d'ingénierie CANopen.
En savoir plus sur la technologie radar

Les détecteurs radar industriels Pepperl+Fuchs vous permettent de mesurer la distance et la vitesse sans interférence, même en cas de pluie, de brouillard, de vent ou de poussière. Découvrez ce principe de fonctionnement de détection unique et tous les avantages qu'il peut vous offrir.


Pepperl+Fuchs AG
Längfeldweg 116
2504 Biel/Bienne
Suisse
info@ch.pepperl-fuchs.com
 +41 32 374 76 76
+41 32 374 76 76
Pepperl+Fuchs est leader comme concepteur et fabricant de capteurs et composants électroniques pour le marché mondial de l'automatisation. L'innovation constante, la qualité incontestable et la croissance soutenue, garantissent notre succès, depuis plus de 70 ans. Pepperl+Fuchs emploie 6300 personnes dans le monde et compte des usines en Allemagne, aux USA, à Singapour, en Hongrie, en Indonésie et au Vietnam ; la plupart d'entre elles sont certifiées ISO 9001.