
Serviceline Industrielle Sensoren
Tel.: 0621 776-1111
Fax: 0621 776-271111
Serviceline Explosionsschutz
Telefon: 0621 776-2222
Telefax: 0621 776-272222

Serviceline Industrielle Sensoren
Tel.: 0621 776-1111
Fax: 0621 776-271111
Serviceline Explosionsschutz
Telefon: 0621 776-2222
Telefax: 0621 776-272222
Serviceline Industrielle Sensoren
Tel.: 0621 776-1111
Fax: 0621 776-271111
Serviceline Explosionsschutz
Telefon: 0621 776-2222
Telefax: 0621 776-272222

Universelle Schnittstellen für die einfache Umsetzung von Vision-Anwendungen
2024-01-08

Die Ausgabe von Rohdaten bietet vielfältige Möglichkeiten, individuelle Vision-Anwendungen umzusetzen. Gleichzeitig ist der Aufwand relativ groß, diese Daten auf konventionelle Weise auszuwerten. Deshalb hat Pepperl+Fuchs den Laserprofilsensor SmartRunner Explorer und den 3-D-Vision-Sensor SmartRunner Explorer 3-D nun mit den herstellerunabhängigen Schnittstellen GenICam und ROS ausgestattet. Dies ermöglicht einen universellen Zugriff auf Daten und Parameter sowie auf eine Vielfalt an Programmierbausteinen in Softwarebibliotheken. So sparen Anwender Zeit und Kosten bei der Umsetzung von Applikationen in der industriellen Bildverarbeitung.
Einheitliche Daten und Zugriff auf Bildverarbeitungsbibliotheken mit GenICam
Jeder Vision-Sensor ist anders. Deshalb müssen sich Anwender für die Auswertung der Rohdaten häufig zunächst in die Datenstrukturen der proprietären Systeme einarbeiten. Um diesen Aufwand zu minimieren, wurde die universelle Programmierschnittstelle GenICam entwickelt. Dieser Standard der European Machine Vision Association (EMVA) bringt die produktspezifischen Daten und Parameter in eine generische Struktur. So wird eine standardisierte Be- und Verarbeitung möglich.
Mit GenICam lassen sich der SmartRunner Explorer und der SmartRunner Explorer 3-D darüber hinaus an Bildverarbeitungsbibliotheken wie beispielsweise HALCON anbinden. Mit den dort verfügbaren vorgefertigten Programmierbausteinen können Bildverarbeitungsanwendungen schnell und einfach realisiert werden. Da mit GenICam dasselbe Framework für verschiedene Sensoren genutzt werden kann, lassen sich neue Geräte unkompliziert in bestehende Anwendungen integrieren.
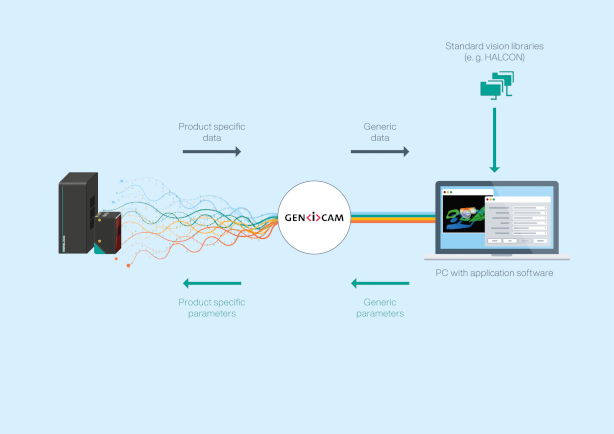
Der GenICam-Standard bringt produktspezifische Daten in eine generische Struktur und erlaubt den Zugriff auf Programmierbausteine in Bildverarbeitungsbibliotheken.
Komplexe Robotikanwendungen und einfache Proof of Concepts mit ROS
Von Pick-and-Place-Anwendungen über die Qualitätskontrolle bis hin zur Kollisionsvermeidung: Der Laserprofilsensor SmartRunner Explorer und der 3-D-Vision-Sensor SmartRunner Explorer 3-D übernehmen anspruchsvolle Aufgaben an Fertigungsrobotern oder fahrerlosen Transportsystemen. Diese Anwendungen sind meist komplex und aufwendig zu realisieren. Unterschiedliche Schnittstellen und eine Vielzahl an Anbietern für Sensorik und Aktorik erschweren die Umsetzung zusätzlich.
Hier schafft das quelloffene Framework Robot Operating System (ROS) Abhilfe: Es umfasst eine Reihe von Softwarebibliotheken, Werkzeugen und Programmen, die als Open-Source-Software zur Verfügung stehen. Damit lassen sich Anwendungen schnell und einfach auf PCs oder Industrie-PCs umsetzen.
Auch über die Robotik hinaus bietet ROS Vorteile für Anwender. So lassen sich mit den Open-Source-Tools kostengünstige Proof of Concepts durchführen, die als Grundlage für Investitionsentscheidungen genutzt werden können.
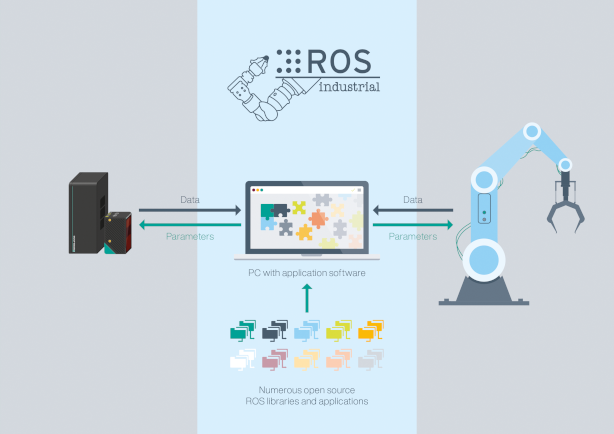
Mit ROS erhalten Anwender Zugriff auf vielfältige Open-Source-Tools, mit denen sich Applikationen einfach und kostengünstig realisieren lassen.
Die Vorteile der universellen Schnittstellen auf einen Blick
- Zeit- und Kostenersparnis durch Zugriff auf Programmierbausteine in Bildverarbeitungsbibliotheken
- Schneller und einfacher Proof of Concept für neue Anwendungen
- Herstellerunabhängige Integration von Vision-Sensoren
- Keine Einarbeitung in herstellerspezifische Schnittstellen erforderlich

Erhalten Sie mehr Informationen über den SmartRunner Explorer 3-D mit Stereo-Vision- und Time-of-Flight-Technologie.

Entdecken Sie die Laserprofilsensoren mit der neuen SmartRunner-Technologie, die erstmals das leistungsstarke Lichtschnittverfahren mit einem Vision-Sensor inklusive LED-Beleuchtung vereint …


Pepperl+Fuchs Vertrieb Deutschland GmbH
Lilienthalstraße 200
68307 Mannheim
Germany
info@de.pepperl-fuchs.com
 +49 621 776-0
+49 621 776-0
© 2025 Alle Rechte vorbehalten.
Pepperl+Fuchs ist einer der Marktführer in Entwicklung und Herstellung von elektronischen Sensoren und Komponenten für den weltweiten Automatisierungsmarkt. Kontinuierliche Innovation, hohes Qualitätsniveau und ständiges Wachstum bilden die Basis unseres Erfolges, seit mehr als 70 Jahren. Pepperl+Fuchs hat weltweit 6.300 Mitarbeiter und Produktionsstandorte in Deutschland, den USA, Singapur, Ungarn, Indonesien und Vietnam, die mehrheitlich nach ISO 9001 zertifiziert sind.