

Goederenafhandeling

Voor het opheffen, beveiligen en verplaatsen van ladingen hebben automatisch geleide voertuigen (AGV's) allerlei informatie nodig om deze processen veilig en soepel te laten verlopen. Eerst moet het autonoom voertuig nauwkeurig dokken op het correcte overslagstation. Tijdens het laden en lossen moet worden gegarandeerd dat de ladingdragers op betrouwbare wijze worden gedetecteerd en correct worden gepositioneerd. Ladingidentificatie kan ook voor de nodige uitdagingen zorgen, bijvoorbeeld wanneer verschillende voorwerpen tegelijk moeten worden gedetecteerd of wanneer een robot op de AGV precies moet worden aangestuurd.
Van docking over ladingdetectie en positionering tot ladingidentificatie, Pepperl+Fuchs biedt een grote variëteit aan compacte en robuuste sensoren die ideaal zijn voor gebruik in automatisch geleide voertuigen. Zo zorgen contactloze sensortechnologieën voor een veilige materiaaloverdracht, terwijl krachtige identificatiesystemen de goederendragers zelfs in zware industriële omgevingsomstandigheden op betrouwbare wijze blijven identificeren.
Discover our load handling solutions for your AGV in an interactive way!
Solutions for Docking

Voor een correcte overdracht van goederen moeten automatisch geleide voertuigen op zelfstandige wijze de correcte positie op het overslagstation vinden. Aangezien de volgende stappen vaak veiligheidskritisch zijn, moet hierbij aan de eisen van functionele veiligheid worden voldaan. Hiervoor zorgt het safePGV-positioneringssysteem, dat een veilige positioneringen identificatie tot SIL 3-/ PL e-niveau waarborgt met behulp van een enkele sensor.

Tijdens het laden en lossen, moeten mobiele robots correct op een station dokken om een vlotte en foutloze overdracht van de goederendrager te garanderen. De besturing van dit proces vereist een eenvoudige, maar robuuste signaaloverdracht. Met behulp van twee optische eenwegsensoren van het type BB10 kan deze taak op plaatsbesparende en kostenefficiënte wijze worden uitgevoerd. Twee verschillende overdrachtfrequenties staan in voor een storingsvrije signaaloverdracht—zelfs wanneer er zich metalen structuren in de onmiddellijke omgeving bevinden.
Bij de overdracht van goederendragers kunnen gevaarlijke bewegingen op de overslagstations plaatsvinden. Om zowel de veiligheid van het personeel als een constante systeembeschikbaarheid te garanderen, worden optische dataoverdrachtsensoren van de DAD15-serie gebruikt. Deze robuuste, kosteneffectieve oplossing biedt een veiligheidsverificatie van de correcte voertuigpositie tot PL d-niveau.
Solutions for Load Positioning and Detection
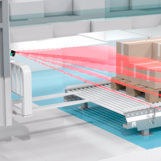
Bij het laden en lossen van automatisch geleide voertuigen op overdrachtstations, moet de positie van de lading exact worden gedetecteerd. Om een correcte overdracht te garanderen, wordt een R2300 3D-LiDAR-sensor op de mast van het voertuig gemonteerd. Deze levert meetwaarden bij nadering van de AGV en wanneer de lading wordt geladen, informatie die vervolgens ter beschikking van het besturingssysteem wordt gesteld in de vorm van een 3D-puntenwolk.

Bij het vervoer van goederen, worden pallets door automatisch geleide voertuigen opgetild, naar hun bestemming gebracht en daar neergezet. Om het verschuiven van de pallets tijdens dit proces te voorkomen, levert de op het voertuig gemonteerde SmartRunner Explorer 3D vision-sensor een 3D-beeld met hoge resolutie van het doelobject als informatiebasis voor voertuigbesturing.

AGV’s worden gebruikt om componenten in rolwagentjes te vervoeren. Om te voorkomen dat deze wagentjes kantelen of wegrollen tijdens het transport, moeten ze correct op het voertuig worden gepositioneerd. Inductieve veiligheidssensoren garanderen een betrouwbare detectie van de materiaalwagentjes tot SIL 2-/ PL d-niveau. Dankzij hun compact design kunnen ze makkelijk in automatisch geleide voertuigen worden ingebouwd.

In fabriekshallen en magazijnen worden vaak mobiele robots (AMR’s) ingezet om goederen op europallets te verplaatsen. De OQT400-R200 triangulatiesensor wordt gebruikt voor een foutloze detectie van de klossen onderaan de pallets. Dankzij multipixeltechnologie (MPT) is deze sensor bijzonder ongevoelig voor omgevingslicht en slaagt hij erin om achtergrondweerkaatsingen te onderdrukken. Zo kunnen de klossen van de pallets te allen tijde correct worden gedetecteerd en worden valse waarnemingen onderdrukt.

Opdat autonome hoogstapelaars de pallets veilig kunnen optillen of neerzetten, moet de vork nauwkeurig naar de doelpositie worden gebracht—in hoogstapelmagazijnen zelfs op zeer uiteenlopende hoogtes. De ECA10TL trekkoord-encoder meet de hoogte van de laadvork met optimale nauwkeurigheid. Het robuust ontwerp van de roterende encoder en meetkabel verzekert gebruik in zware industriële omgevingsomstandigheden—of het nu om stof, vuil, vocht of extreme temperatuurschommelingen gaat.
Solutions for Load Identification

RFID-systemen zijn de ideale keuze voor een betrouwbare identificatie van ladingen, onafhankelijk van omgevingsinvloeden. Aangezien automatisch geleide voertuigen onder zware industriële omstandigheden worden ingezet, moeten de gebruikte RFID-systemen in staat zijn weerstand te bieden aan grote thermische en mechanische belastingen. De uiterst robuuste F61 RFID-lees-/schrijfapparaten zijn perfect voor deze taak. Hun compact ontwerp maakt hen bijzonder makkelijk integreerbaar in autonome bots.

Wanneer zich verschillende voorwerpen op één goederendrager bevinden, is het niet altijd makkelijk om de producten te identificeren die bij eenzelfde vervoersopdracht horen. Het F190 RFID-lees-/schrijfapparaat werd speciaal voor deze uitdaging ontworpen. Het detecteert tot 40 tags in eenzelfde scanbewerking met behulp van de multitagfunctie. Dankzij het indrukwekkende overdrachtsvermogen van het leesapparaat, kunnen de RFID-tags worden gedetecteerd zodra het voertuig de goederendrager nadert, zodat het laadproces geen vertraging oploopt.

Bij het vervoer van wagentjes of rekken, rijden de bots tot in de opening onder de goederendrager om deze op te tillen. Hiervoor voert het PGV-positioneringssysteem twee taken tegelijk uit: een PGV-leesapparaat bovenop het voertuig identificeert de goederendrager met behulp van een data matrix-tag en, tegelijkertijd, wordt de relatieve positie van het voertuig bepaald op basis van de oriëntatie van het leesapparaat ten opzichte van de tag. Dit waarborgt een nauwkeurige uitlijning van de AGV en een veilige verplaatsing van de goederendrager.

Steeds vaker worden AGV’s waarop een hulprobot met meerassige arm gemonteerd is, gebruikt in productieomgevingen om de vereiste componenten in de machines te voeden. De besturing vereist een variëteit aan gegevens om een betrouwbare detectie van de voorwerpen en nauwkeurige bepaling van hun positie te waarborgen. Voor deze toepassing biedt de universele 2D-vision-sensor VOS2000 flexibel combineerbare visualiseringshulpmiddelen, met name voor positie- en vormdetectie, vergelijking en identificatietaken.

Een betrouwbare navigatie van automatisch geleide voertuigen vereist krachtige technologieën. Ontdek onze oplossingen voor navigatie en aansturing!

AGV’s moeten hun omgeving continu aftasten zodat botsingen met mensen en voorwerpen kunnen worden voorkomen. Ontdek de juiste producten voor omgevingsdetectie!


Pepperl+Fuchs B.V.
Pettelaarpark 104
5216 PR 's-Hertogenbosch
Nederland
sales@nl.pepperl-fuchs.com
 +31 73 75 07 107
+31 73 75 07 107
sales-pa@nl.pepperl-fuchs.com
+31 73 75 07 108
Pepperl+Fuchs is een toonaangevend ontwikkelaar en producent van elektronische sensoren en componenten voor de wereldwijde automatiseringsmarkt. Continue innovatie, hoge kwaliteit en gestage groei zijn de basis van ons succes, al meer dan 70 jaar. Pepperl+Fuchs heeft wereldwijd 6300 medewerkers en productiefaciliteiten in Duitsland, de Verenigde Staten, Singapore, Hongarije, Indonesië en Vietnam, waarvan het merendeel ISO 9001 gecertificeerd.