

Automatyczny załadunek i rozładunek nośników ładunku
Dane 3D przeznaczone do wykrywania w wysokiej rozdzielczości podczas transferu
Zastosowanie
Pojazdy sterowane automatycznie (AGV, AMR) wykonują liczne zadania transportowe w intralogistyce. Transportowane towary są często umieszczane na paletach lub na innych standardowych nośnikach ładunku. Palety są pobierane i składowane w pełni automatycznie przez pojazdy autonomiczne. Może się to odbywać na stałych stacjach transferowych lub w dowolnym miejscu przechowywania. Możliwe jest również układanie palet jedna na drugiej i pobieranie górnej warstwy.
Cel
Podczas załadunku należy wykryć położenie palety, aby prawidłowo ustawić pojazd pod paletą lub przesunąć ramiona wideł w otwory palety. Podczas tego procesu paleta nie może być przesuwana. Podczas rozładunku palety konieczne jest wykrycie, czy paleta została odłączona od wideł.
The Solution

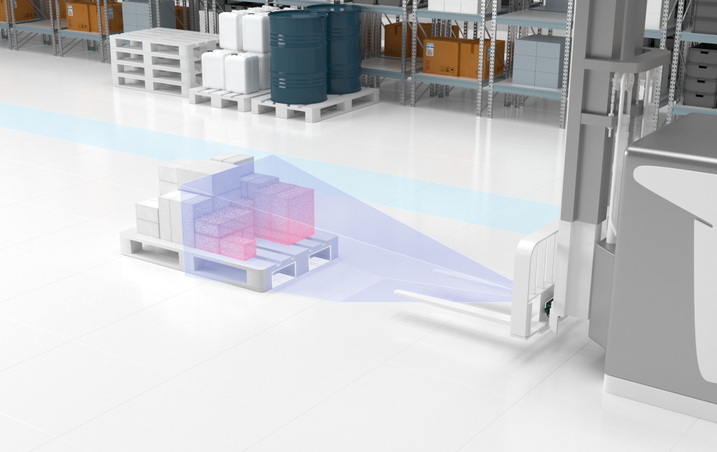
SmartRunner Explorer 3-D
The SmartRunner Explorer 3-D vision sensor is mounted on the mast or between the vehicle’s fork arms. Its sensing range is directed toward the load carrier. When approaching the pallet and during the loading and unloading process, the sensor uses the time-of-flight (ToF) technology to provide measurement data in the form of a 3-D point cloud, which the target area displays at a very high resolution of 307,200 pixels. The vehicle controller therefore receives the information that allows the process to be finely adjusted.
Technical Features
- Laser class 1 for eye safety
- Operating frequency up to 30 Hz
- Gigabit Ethernet TCP/IP interface
- Compact dimensions (165 × 67 × 56 mm)
- Suppression of ambient light > 100 klx
- Raw image size 640 × 480 pixels

Korzyści

Informacje szczegółowe dotyczące rozwiązania SmartRunner Explorer 3-D
SmartRunner Explorer 3-D to niezawodne rozwiązanie kontroli operacji załadunku i rozładunku. To kompaktowe urządzenie mieści się w bardzo ciasnych przestrzeniach. Dzięki wysokiej szybkości pomiaru wynoszącej 30 Hz dostarcza wiarygodne dane nawet podczas szybkich procesów. Jednocześnie charakteryzuje się oszczędzającym zasoby przetwarzaniem danych pomiarowych. Skanuje przy użyciu światła podczerwonego o długości fali wynoszącej 940 nanometrów. Dzięki temu jest szczególnie odporne na oświetlenie otoczenia i dlatego nadaje się do stosowania na zewnątrz.
Najważniejsze informacje
- Obrazowanie 3D obiektu docelowego w wysokiej rozdzielczości zapewnia niezawodny zakres danych sterownikowi pojazdu
- Wysoka szybkość pomiaru zapewnia niezawodne wykrywanie nawet podczas szybkich procesów
- Niezawodne rozwiązanie załadunku i rozładunku
- Oszczędzające zasoby przetwarzanie danych pomiarowych

Uzyskaj więcej informacji na temat trójwymiarowego czujnika SmartRunner Explorer z wizją stereoskopową i technologią pomiaru czasu odbicia wiązki.

Pojazdy sterowane automatycznie stały się nieodzownym elementem nowoczesnego przeładunku materiałów. Odkryj nasze czujniki i rozwiązania do obsługi ładunków, nawigacji i prowadzenia oraz percepcji otoczenia.


Pepperl+Fuchs Sp. z o.o.
ul. Owsiana 12
03-825 Warszawa
Polska
NIP: 522-28-27-777
 +48 22 256 9770
+48 22 256 9770
Pepperl+Fuchs jest czołową firmą konstruującą i produkującą czujniki elektroniczne oraz inne komponenty dla globalnego rynku automatyki. Innowacyjność, wysoka jakość oraz stały rozwój firmy powodują, iż z sukcesem jesteśmy obecni na rynku od ponad 70 lat. Pepperl+Fuchs zatrudnia ponad 6300 pracowników na całym świecie i ma swoje zakłady produkcyjne w Niemczech, USA, Singapurze, na Węgrzech, w Indonezji i Wietnamie. Większość z nich posiada certyfikat ISO 9001.