
Serviceline Industrial Sensors
Tél.: +32 (0)3-644 25 00
Support en ligne pour la protection contre le risque d’explosion

Serviceline Industrial Sensors
Tél.: +32 (0)3-644 25 00
Support en ligne pour la protection contre le risque d’explosion
Serviceline Industrial Sensors
Tél.: +32 (0)3-644 25 00
Support en ligne pour la protection contre le risque d’explosion

Manutention de charges

Lorsqu'il s'agit de saisir, arrimer et transporter des charges, les véhicules à guidage automatique (VGA) ont besoin d'un large éventail d'informations pour garantir des processus sûrs et fluides. Tout d'abord, le véhicule automatisé doit s'arrimer précisément à la bonne station de transfert. Lors du chargement et du déchargement, il faut veiller à ce que les porte-charges soient détectés de manière fiable et positionnés correctement. L'identification de la charge peut également devenir un problème si, par exemple, plusieurs objets doivent être détectés simultanément ou si un robot monté sur le VGA doit être contrôlé avec précision.
De l'arrimage à la détection des charges, en passant par leur positionnement et leur identification, Pepperl+Fuchs propose une gamme exhaustive de détecteurs compacts et robustes, parfaits pour une utilisation sur les véhicules à guidage automatique. Par exemple, les technologies sans contact garantissent un transfert sûr des matériaux, tandis que les systèmes d'identification puissants identifient de manière fiable les porte-charges, même dans des conditions difficiles.
Discover our load handling solutions for your AGV in an interactive way!
Solutions for Docking

Pour un transfert correct des marchandises, les véhicules à guidage automatique doivent trouver automatiquement la bonne position à la station de transfert. Les étapes suivantes étant souvent applicables à la sécurité, les exigences de la sécurité fonctionnelle doivent être satisfaites à ce stade. Ceci est assuré par le système de positionnement safePGV, qui permet un positionnement et une identification sûrs jusqu'à SIL 3/PL e avec un seul capteur.

Lors du chargement et du déchargement, les robots mobiles doivent s'amarrer correctement à une station pour garantir un transfert fluide du porte-charge. Une transmission de signaux simple mais robuste est nécessaire pour contrôler ce processus. Avec deux détecteurs optoélectroniques en mode barrage de type BB10, cette tâche peut être effectuée en utilisant peu d'espace et de manière rentable. Deux fréquences de transmission différentes garantissent une transmission du signal sans interférence, même avec les structures métalliques environnantes.
Lors du transfert des porte-charges, des mouvements dangereux peuvent se produire à la station d'accueil. Les transmetteurs de données optiques DAD15 sont utilisés pour garantir la sécurité du personnel autorisé et la disponibilité constante du système. Cette solution robuste et économique permet de vérifier en toute sécurité la position correcte du véhicule jusqu'à PL d.
Solutions for Load Positioning and Detection
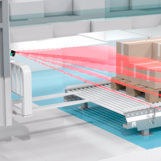
Lors du chargement et du déchargement de véhicules à guidage automatique dans des stations de transfert, la position de la charge doit être détectée avec précision. Pour assurer un transfert correct, un détecteur LiDAR 3D R2300 est monté sur le mât du véhicule. Il fournit des données de mesure à l'approche du VGA et au fur et à mesure que la charge est chargée. Ces données sont disponibles pour le système de commande sous forme de nuage de points 3D.

Lors du transport de marchandises, les palettes sont ramassées par des véhicules à guidage automatique, acheminées jusqu'à leur destination et déposées à nouveau sur place. Pour s'assurer que les palettes ne sont pas déplacées dans le processus, le détecteur de vision 3D SmartRunner Explorer monté sur le véhicule fournit une image 3D haute résolution de l'objet cible comme base de données pour la commande du véhicule.

Les VGA transportent souvent des composants qui se trouvent dans des chariots. Pour éviter que ces chariots ne basculent ou ne roulent pendant le trajet, ils doivent être positionnés correctement sur le véhicule. Les capteurs de sécurité inductifs assurent une détection fiable de la position du chariot à matériaux jusqu'à SIL 2/PL d. Grâce à leur conception compacte, ils peuvent être facilement intégrés dans des véhicules à guidage automatique.

Dans les salles de production et les entrepôts, les robots mobiles autonomes (AMR) transportent souvent des marchandises placées sur des palettes Euro. Le capteur à triangulation OQT400-R200 est utilisé pour la détection sans erreur des pieds de palettes. Grâce à la technologie multipixel (MPT), ce capteur est particulièrement peu sensible aux effets de la lumière ambiante et supprime de manière fiable les reflets de fond indéfinis. De cette manière, les pieds des palettes sont détectés avec précision à tout moment et les erreurs de détection sont supprimées.

Pour que les chariots élévateurs VGA puissent saisir ou déposer des palettes, les fourches doivent être déplacées avec précision jusqu'à la position cible, dans les entrepôts à hauts rayonnages, même avec de grandes différences de hauteur. Le codeur rotatif à câbles ECA10TL détecte la hauteur de la fourche avec une précision maximale. La conception robuste du codeur rotatif et du câble de mesure permet de l'utiliser dans des conditions environnementales difficiles, qu'il s'agisse de poussière ou de saleté, d'humidité ou de fortes variations de température.
Solutions for Load Identification

Les systèmes RFID constituent le choix idéal pour une identification fiable des charges, indépendamment des influences de l'environnement. Comme les véhicules à guidage automatique fonctionnent souvent dans des conditions difficiles, les systèmes RFID utilisés doivent pouvoir résister à d'importantes contraintes thermiques et mécaniques. L'appareil de lecture/écriture RFID F61 ultra-robuste est parfait pour cette tâche. Sa conception compacte le rend particulièrement facile à intégrer dans des robots automatisés.

S'il y a plusieurs objets sur un porte-charge, il est difficile d'identifier correctement les produits appartenant à un ordre de transport. L'appareil de lecture/écriture RFID F190 est conçu pour relever ce défi. Il détecte jusqu'à 40 étiquettes en une seule opération de lecture grâce à la détection multi-étiquettes. Grâce à la grande puissance de transmission du dispositif de lecture, les étiquettes RFID peuvent être détectées dès que le véhicule s'approche du porte-charge, ce qui évite tout retard de chargement.

Lors du transport de chariots ou de racks, des robots s'introduisent dans un renfoncement sous le porte-charge pour le soulever. Ici, le système de positionnement PGV effectue deux tâches en une : Un appareil de lecture PGV monté sur le toit du véhicule identifie le porte-charge à l'aide d'une étiquette Data Matrix. En même temps, la position relative du véhicule est déterminée en fonction de l'orientation de l'appareil de lecture par rapport à l'étiquette. Cela garantit un alignement précis du VGA et un transport sûr du porte-charge.

Les VGA sur lesquels est monté un robot collaboratif doté d'un bras multi-axes sont de plus en plus souvent utilisés dans la production pour alimenter les machines avec les composants requis. Le contrôleur a besoin d'un ensemble d'informations différentes pour détecter de manière fiable les objets et déterminer avec précision les positions à approcher. Pour cette application, le capteur de vision universel 2D VOS2000 offre un ensemble d'outils de vision combinables de manière flexible, notamment pour les tâches de détection de position et de forme, de mise en correspondance et d'identification.

Des technologies puissantes sont nécessaires pour assurer la fiabilité de la navigation des véhicules à guidage automatique. Découvrez nos solutions de navigation et de guidage !

Les VGA doivent détecter avec précision leur environnement afin d'éviter les collisions avec des personnes ou des objets. Trouvez les produits adéquats dédiés à la perception de l'environnement !


Pepperl+Fuchs S.A.
Metropoolstraat 11
2900 Schoten / Anvers
Belgique
TVA BE 0436.097.152, RPM Anvers, dép.Anvers
sales@be.pepperl-fuchs.com
 +32 3 644 25 00
+32 3 644 25 00
© 2025 Tous droits réservés.
Pepperl+Fuchs est leader comme concepteur et fabricant de capteurs et composants électroniques pour le marché mondial de l'automatisation. L'innovation constante, la qualité incontestable et la croissance soutenue, garantissent notre succès, depuis plus de 70 ans. Pepperl+Fuchs emploie 6300 personnes dans le monde et compte des usines en Allemagne, aux USA, à Singapour, en Hongrie, en Indonésie et au Vietnam ; la plupart d'entre elles sont certifiées ISO 9001.