

Az AGV-k ütközéselkerülése minden időjárási körülmények között
Radaros érzékelő beépített CAN interfésszel a vezető nélküli szállítójárművek számára
Az alkalmazás
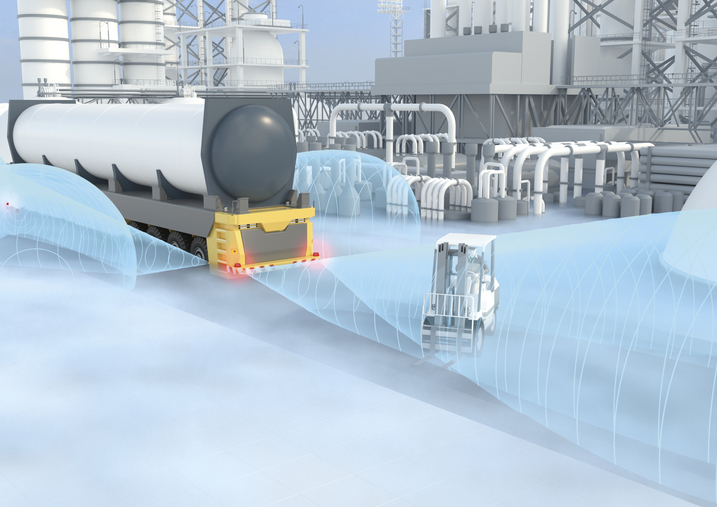
A vegyiparban az automatizált irányítású járműveket (AGV-ket) számos telephelyen használják. Az útvonalakat azonban más járművek is használják. Ha az AGV-k nem könnyen belátható terepen mozognak változatos időjárási körülmények között, mindig biztosítani kell az ütközéselkerülést más, az útjukba kerülő járművekkel vagy tárgyakkal szemben.
A cél
A járművet a közvetlen ütközés előtt biztonságos módon kell megállítani, és szükség esetén el kell végezni az útvonal korrekcióját. Ennek lehetővé tétele érdekében az érzékelőknek nagy távolságon kell figyelniük az útvonalat. Akadály észlelése esetén az érzékelő megfelelő jelet küld a vezérlőegységnek, és az AGV lelassul. Ezenkívül az alkalmazott érzékelőtechnológiának garantálnia kell a tárgyak észlelését kedvezőtlen környezetben. A vegyiparban gyakran száll fel gőz a szennyvízrendszerből. A gőz ellenére a tárgyakat úgy kell észlelni, hogy az AGV ne ütközzön semmivel. Az ilyen külső körülmények kihívást jelentenek a fotoelektromos érzékelők számára, azonban ez radartechnológiával könnyen megkerülhető. A radaros érzékelők ellenállnak a kihívást jelentő időjárási körülményeknek, és megbízhatóan működnek szennyeződés, nedvesség, pára vagy egyéb interferencia jelenlétében.
A biztonsági rendszernek a helyzettől függően meg kell felelnie egy adott teljesítményszintnek (PL) vagy biztonságintegritási szintnek (SIL). Ehhez abszolút megbízható érzékelésre vagy távolságmérésre van szükség az érintett területen. Az alkalmazásnak ezért el kell érnie a c (PL c) teljesítményszintet.
A megoldás
A frekvenciamodulált folyamatos hullámú (FMCW) radaros érzékelők tökéletesen alkalmasak a fő haladási irányok optimális megfigyelésére, még ennyire mostoha környezeti körülmények között is. Az időjárástól és más külső hatásoktól függetlenül az MWC25M-L2M-* sorozatú érzékelők megbízhatóan mérik fel a természetes tárgyakat, és ennek megfelelően előre észlelik a lehetséges ütközést.
Az érzékelési tartomány az előtér- és háttérelnyomás miatt a környezethez igazítható. Az alkalmazástól függően összesen három mérési üzemmód között lehetséges a váltás. Az „első tárgy” üzemmód az AGV-k ütközéselkerülésére szolgál; ennek során az érzékelőhöz legközelebb eső tárgy mindig érzékelésre kerül. Az akár 200 Hz-es, nagy mintavételi frekvenciával megbízhatóan mérhető a látómezőben (Field of View, FOV) lévő tárgyaktól való távolság és ezen tárgyak relatív sebessége.
Az MWC*-L2M-B16 sorozatú radaros érzékelők a kívánt teljesítménytől vagy biztonságintegritási szinttől függően egyenként vagy redundáns konfigurációban is használhatók. Az egyedi biztonsági koncepciónak és a diagnosztikára alkalmas vezérlőnek köszönhetően az érzékelők jól használhatóak a biztonsági szempontból kiemelt alkalmazásoknál, és megkönnyítik a felhasználó számára a megfelelő bizonyíték rendelkezésre bocsátását.
Műszaki jellemzők
- Mérési tartomány: 0,5–25 m
- Működési frekvencia: 122,25–123 GHz
- Védettségi szint: IP68/IP69
- Holtsáv: 0–0,5 m
- Hőmérsékleti tartomány: -40 °C és +70 °C között
- Kiterjesztett EMC, E1 szinthez és impulzusokhoz mérhető
Az előnyök

A sorozat beépített CAN interfésze lehetővé teszi a jármű CANopen buszrendszerébe történő egyszerű integrációt. Ezenkívül rendelkezésre állnak az érzékelő állapotinformációi, például a „termelő szívverése” és a mért távolság értékének érvényessége. Ezek az adatok biztonságos vezérlőrendszerben használhatók annak ellenőrzésére, hogy az érzékelő megfelelően működik-e. Ez lehetővé teszi a Category 2 c (PL c) teljesítményszint elérését, és így az alkalmazásbiztonság szavatolását, még utólagos felszerelés esetén is. A paraméterezés egyszerű a CANopen paraméterező szoftver és a PACTware DTM segítségével segítségével.
Rövid áttekintés
- Integrált CAN interfész
- Teljesítményszint c (PL c)
- Az AGV-k ütközéselkerülése elöl és hátul (opcionálisan oldalt)
- A radartechnológia különösen jól alkalmazható nehéz időjárási körülmények között

A Pepperl+Fuchs ipari radaros érzékelői interferenciamentes távolság- és sebességmérést biztosítanak – esőben, ködben, szél vagy por esetén is. Tudjon meg többet erről az egyedülálló működési elvről és az összes előnyről, amelyet elérhetővé tesz az Ön számára.


Pepperl+Fuchs Kereskedelmi Kft.
8200 Veszprém
Kistó utca 16 - 18.
Magyarország
sales@hu.pepperl-fuchs.com
 +36 88 545 902
+36 88 545 902
A Pepperl+Fuchs az elektronikai érzékelők és alkatrészek vezető fejlesztő és gyártó vállalata a globális automatizálási piacon. A folyamatos innováció, a tartós minőség és az állandó növekedés már több mint 70 éve garantálja a sikert. A Pepperl+Fuchs 6300 embert alkalmaz világszerte, gyártóegységei vannak Németországban, az USA-ban, Szingapúrban, Magyarországon, Indonéziában és Vietnámban, legtöbbjük ISO 9001 tanusítvánnyal is rendelkezik.