

Carregamento e descarregamento automático de transportadores de carga
Dados 3D para detecção de alta resolução durante a transferência
Aplicação
Os veículos guiados automatizados (AGVs, AMRs) executam diversas tarefas de transporte em intralogística. As mercadorias transportadas são frequentemente colocadas em paletes ou outros transportadores de carga padronizados. Os paletes são levantados e posicionados automaticamente pelos veículos autônomos. Isso pode ser feito em estações de transferência fixas ou em qualquer posição de armazenamento. Também é possível empilhar um palete sobre o outro e pegar a camada superior.
Objetivo
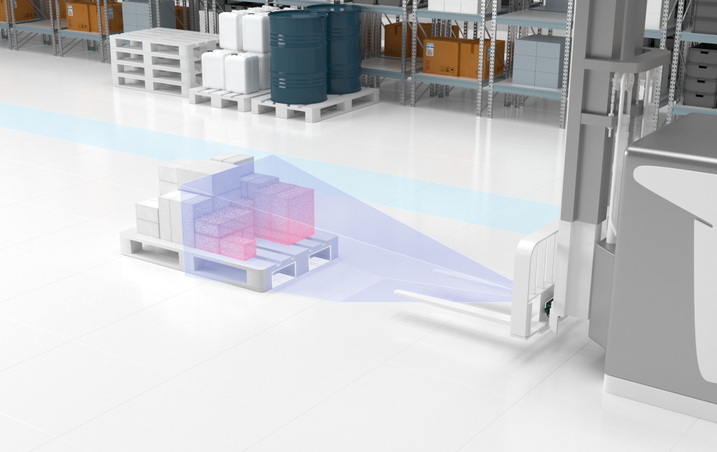
Durante o carregamento, a posição do palete deve ser detectado para mover o veículo sob ele corretamente ou para manobrar as forquilhas nas aberturas do palete. O palete não deve ser movido durante esse processo. Ao descarregar o palete, é necessário detectar se o palete se soltou da forquilha.
The Solution

SmartRunner Explorer 3-D
The SmartRunner Explorer 3-D vision sensor is mounted on the mast or between the vehicle’s fork arms. Its sensing range is directed toward the load carrier. When approaching the pallet and during the loading and unloading process, the sensor uses the time-of-flight (ToF) technology to provide measurement data in the form of a 3-D point cloud, which the target area displays at a very high resolution of 307,200 pixels. The vehicle controller therefore receives the information that allows the process to be finely adjusted.
Technical Features
- Laser class 1 for eye safety
- Operating frequency up to 30 Hz
- Gigabit Ethernet TCP/IP interface
- Compact dimensions (165 × 67 × 56 mm)
- Suppression of ambient light > 100 klx
- Raw image size 640 × 480 pixels

Benefícios

Detalhes do SmartRunner Explorer 3D
O SmartRunner Explorer 3D fornece uma solução confiável para controlar operações de carregamento e descarregamento. O dispositivo compacto cabe em espaços muito restritos. Com sua alta taxa de medição de 30 Hz, ele fornece dados confiáveis mesmo em processos rápidos. Ao mesmo tempo, ele é caracterizado por seu processamento de dados de medição que economiza recursos. Ele faz varreduras usando luz infravermelha com um comprimento de onda de 940 nanômetros. Isso o torna especialmente resistente à luz ambiente e, portanto, adequado para uso externo.
Visão geral
- A formação de imagens em 3D de alta resolução do objeto-alvo fornece uma gama confiável de dados para o controlador do veículo
- Alta taxa de medição para detecção confiável, mesmo em processos rápidos
- Solução confiável para carregamento e descarregamento
- Processamento de dados de medição com economia de recursos

Obtenha mais informações sobre o SmartRunner Explorer 3D com visão estéreo e tecnologia de tempo de voo.

Veículos guiados automatizados se tornaram uma parte indispensável do moderno manuseio de materiais. Descubra nossos sensores e soluções para o manuseio de carga, navegação e orientação e percepção ambiental.


Pepperl+Fuchs Ltda.
Rua José Versolato, 111
Domo Corporate Tower, Conjunto 144
09750-730 São Bernardo do Campo, SP
Brasil
vendas@br.pepperl-fuchs.com
 +55 11 4007 1448
+55 11 4007 1448
A Pepperl+Fuchs é líder na fabricação e no desenvolvimento de sensores e componentes eletrônicos para o setor global da automação industrial. Inovação contínua, qualidade e crescimento constante garantem o nosso sucesso há mais de 70 anos. Empregamos mais de 6.300 colaboradores em todo o mundo e contamos com fábricas próprias na Alemanha, Estados Unidos, Cingapura, Hungria, Indonésia e Vietnã, todas com certificação ISO 9001.