

Miniaturní fotoelektrické senzory řady ML100 – Tři nové vysoce výkonné difúzní senzory
Pokročilá řešení dostupná v aplikacích
Do řady ML100 byly zahrnuty nové modely fotoelektrických senzorů.
Miniaturní fotoelektrické senzory řady ML100 umožňují spolehlivé vyhodnocování v různých oblastech průmyslové automatizace. Díky miniaturní konstrukci pouzdra jsou tyto fotoelektrické senzory zvlášť vhodné pro použití ve stísněných prostorách.
Populární řada ML100 byla nyní rozšířena o tři nové modely difúzních senzorů. Spolu s prověřenými produktovými řadami umožňují tyto nové modely uživatelům implementovat pokročilá řešení stále složitějších aplikací.
Difúzní senzor s velmi širokým viditelným světelným bodem – ML100-8-W
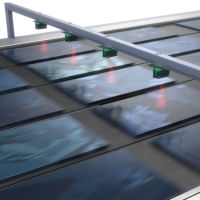
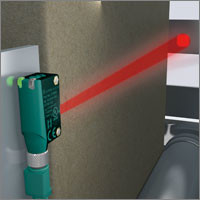
Model ML100-8-W je vysoce výkonný difúzní senzor s velmi širokým viditelným světelným bodem. Velmi velký světelný bod zabraňuje nesprávnému spínání u povrchů s vysokou hrubostí a je vysoce odolný proti vibracím a náklonu objektů. Ideální využití tohoto difúzního senzoru je pro přepravu skla nebo modulovou přepravu v systémech s pásovými dopravníky. Navíc je ideální volbou pro výrobu plochých panelů, konkrétně pro zdvihací stoly nebo přepínače stopy. V těchto aplikacích není možné pro detekci skla používat reflexní senzory, jelikož reflektory brání volnému pohybu zboží.
- Senzor vybavený světelným bodem s velmi širokým paprskem
- Je určen pro použití u velmi hrubých a šikmých povrchů
Difúzní senzor s vyhodnocováním pozadí – ML100-8-HW
Funkce vyhodnocování pozadí modelu ML100-8-HW je založena na principu triangulace. Přijímač, skládající se z prvků blízkého a vzdáleného pole, je schopen přesně rozlišovat mezi pozadím, např. kovovým rámem, a objektem nacházejícím se v oblasti detekce. Tímto způsobem senzor odkazuje k rozpoznanému pozadí. Objekt je detekován tehdy, pokud díky geometrickému uspořádání dopadá více světla na prvek blízkého pole, než na prvek vzdáleného pole. Objekt je také rozpoznán tehdy, když k přijímači nedorazí žádné světlo, např. pokud je odráženo lesklým předmětem. To umožňuje provoz bez nutnosti používat reflektory. Difúzní senzor také spolehlivě detekuje ploché objekty nebo objekty s nízkou odrazivostí umístěné blízko k pozadí, například černé gumové díly na pásových dopravnících.
- Senzor s vyhodnocováním pozadí na principu triangulace
- Je určen pro použití u cílů s nízkým kontrastem, např. černé na černé
Difúzní senzor s potlačením pozadí – ML100-8-H
V segmentu senzorů s funkcí potlačení pozadí byla řada ML100 rozšířena o difúzní senzor ML100-8-H. Tento senzor disponuje třemi světelnými body, díky kterým je umožněna redundance. Speciální vlastností výstupů jsou logické funkce „AND“ a „OR“. Výstup „OR“ se aktivuje tehdy, je-li detekován některý ze tří světelných bodů, to znamená, že lze spolehlivě detekovat nestejnoměrné objekty. Výstup „AND“ se aktivuje pouze tehdy, jsou-li detekovány všechny tři světelné body. Tímto způsobem lze rozpoznat vlastnosti stejnoměrných objektů, zatímco okolní rušení, např. prachové částice, může být ignorováno.
- Senzor s funkcí potlačení pozadí a třemi světelnými body
- Je určen pro použití u nestejnoměrných objektů


Pepperl+Fuchs s.r.o.
Pod Vodárenskou věží 4
18208 Praha 8
Czech Republic
info@cz.pepperl-fuchs.com
 +420 225 989 180
+420 225 989 180
Pepperl+Fuchs je přední vývojář a výrobce průmyslových senzorů a komponentů pro světový trh automatizace. Neustálé inovace, trvalé kvalitní a stálý růst zaručuje mnoho úspěchů přes více než 70 let. Pepperl+Fuchs zaměstnává 6300 lidí po celém světě a má výrobní závody v Německu, USA, Singapuru, Maďarsku, Indonésii a Vietnamu, které podléhají ISO 9001.