

Automatické nakládání a vykládání nosičů
Trojrozměrná data pro detekci s vysokým rozlišením během přesunu
Použití
Automaticky naváděná vozidla (AGV, AMR) plní řadu úkolů souvisejících s přepravou v interní logistice. Přepravované zboží je často umístěno na paletách nebo jiných standardizovaných nosičích. Palety jsou autonomními vozidly zvedány a pokládány zcela automaticky. To lze provádět na stálých překládacích stanicích nebo na libovolném skladovacím místě. Je také možné palety stohovat na sebe a odebírat horní vrstvu.
Cíl
Během nakládání je nutné zjistit polohu palety, aby bylo možné správně přesunout vozidlo pod paletu nebo zasunout ramena vidlice do otvorů v paletě. Paleta se během tohoto procesu nesmí pohybovat. Při vykládání palety je nutné zjistit, zda se paleta oddělila od vidlice.
The Solution

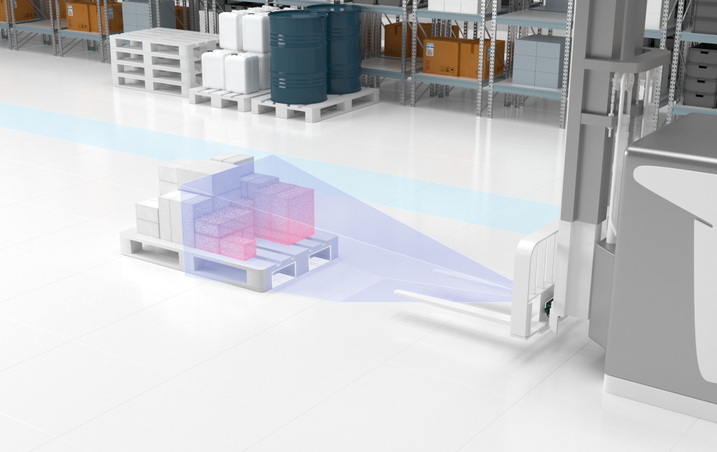
SmartRunner Explorer 3-D
The SmartRunner Explorer 3-D vision sensor is mounted on the mast or between the vehicle’s fork arms. Its sensing range is directed toward the load carrier. When approaching the pallet and during the loading and unloading process, the sensor uses the time-of-flight (ToF) technology to provide measurement data in the form of a 3-D point cloud, which the target area displays at a very high resolution of 307,200 pixels. The vehicle controller therefore receives the information that allows the process to be finely adjusted.
Technical Features
- Laser class 1 for eye safety
- Operating frequency up to 30 Hz
- Gigabit Ethernet TCP/IP interface
- Compact dimensions (165 × 67 × 56 mm)
- Suppression of ambient light > 100 klx
- Raw image size 640 × 480 pixels

Výhody

Podrobnosti o senzorech SmartRunner Explorer 3-D
Senzor SmartRunner Explorer 3-D poskytuje spolehlivé řešení pro řízení operací nakládání a vykládání. Jedná se o kompaktní zařízení, které se vejde do velmi stísněných prostorů. Vzhledem k vysoké frekvenci měření 30 Hz poskytuje spolehlivé údaje i při rychlých procesech. Zároveň se vyznačuje schopností zpracovat naměřená data, čímž šetří zdroje. Snímá pomocí infračerveného světla o vlnové délce 940 nanometrů. Díky tomu je obzvláště odolný vůči okolnímu světlu, a proto je vhodný pro venkovní použití.
Stručný přehled
- Trojrozměrné snímání cílového objektu ve vysokém rozlišení poskytuje spolehlivý rozsah dat pro řídicí jednotku vozidla.
- Vysoká rychlost měření pro spolehlivou detekci i při rychlých procesech
- Spolehlivé řešení pro nakládání a vykládání
- Zpracování naměřených dat pro úsporu zdrojů

Získejte další informace o senzorech SmartRunner Explorer 3-D se stereo viděním a technologií time-of-flight.

Automaticky naváděná vozidla se stala nepostradatelnou součástí moderní manipulace s materiálem. Seznamte se s našimi senzory a řešeními pro manipulaci s břemeny, navigaci, navádění a vnímání prostředí.


Pepperl+Fuchs s.r.o.
Pod Vodárenskou věží 4
18208 Praha 8
Czech Republic
info@cz.pepperl-fuchs.com
 +420 225 989 180
+420 225 989 180
Pepperl+Fuchs je přední vývojář a výrobce průmyslových senzorů a komponentů pro světový trh automatizace. Neustálé inovace, trvalé kvalitní a stálý růst zaručuje mnoho úspěchů přes více než 70 let. Pepperl+Fuchs zaměstnává 6300 lidí po celém světě a má výrobní závody v Německu, USA, Singapuru, Maďarsku, Indonésii a Vietnamu, které podléhají ISO 9001.