


Profielvergelijking
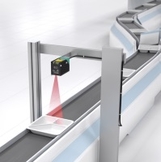
The SmartRunner Matcher uses the laser light section technology to capture height profiles and compares them with a taught reference profile. With up to 32 profiles stored in the sensor, it is perfect for positioning as well as presence and completeness checks of guided components.
The laser profile sensors are based on the unique SmartRunner technology. For the first time, this combines the proven laser light section technology with a 2-D vision sensor including LEDs and offers maximum performance in a compact sensor housing.
SmartRunner Matcher: The Specialist for Profile Matching
The SmartRunner Matcher combines application-specific profile detection with an integrated evaluation in a compact housing. The control unit of the laser profile sensor is optimized to detect deviations from a previously taught-in height profile.
First, a reference profile is taught in via an intuitive operating wizard. In addition, the permitted position and component deviations are defined. Based on this, the sensor verifies the detected profile of the object and its correct position via profile matching. Moreover, variants are available with further functions such as the use and storage of up to 32 profiles on one sensor and the output of the object position deviation. These offer different detection ranges of up to 700 mm distance as well as 300 mm X detection range.
The SmartRunner Matcher can be commissioned easily and intuitively: via the Vision Configurator—the uniform user interface for all vision sensors from Pepperl+Fuchs—via Data Matrix control code or via guided operation and parameterization with the software wizard.
Typical Applications
- Detection of small parts like screws, clamps, and studs
- Completeness check for battery cells, pens, pills, etc.
- Position check and output for boxes, pallets, and other objects
How It Works
This is how the detection of object contour, position and distance works with the Matcher:

Since not every object is the same, a suitable object tolerance must be defined. This is done by defining an envelope curve around a taught-in profile (1). Depending on this, quality values are automatically determined, from which quality threshold values can then be derived to distinguish between good and bad parts. Users can freely define how high the detection sensitivity of the sensor should be (2). Furthermore, displacement tolerances often result from trigger tolerances. With the Matcher, these can also be set in 0.1 mm steps in the X and Z directions so that they do not influence the measurement result (3). The SmartRunner then reliably detects deviating profiles as “Bad” (4).
Highlights
- Rugged and cost-effective presence, completeness, and position detection of components
- Precise profile matching, even with different surface structures, ambient light, and varying operating distances
- Independently adjustable object and offset tolerances and separate data output
De specifieke voorbeelden hieronder demonstreren de talrijke toepassingsmogelijkheden van de SmartRunner Matcher:
In de automotive industrie worden geprefabriceerde platen in elkaar gelast tot carrosserieën. Wanneer een plaat onvolledig of defect is, moet dit tijdig worden gedetecteerd en moet de plaat in kwestie van de productielijn worden verwijderd. De SmartRunner Matcher gebruikt lichtsensortechnologie om voorwerpen te detecteren, profielen te vergelijken en om te bevestigen of componenten volledig zijn…

Bij de montage van carrosserieën worden onderdelen samengevoegd met behulp van bevestigingsmiddelen zoals verbindingsbouten, schroeven en clips. De SmartRunner Matcher detecteert of deze bevestigingsmiddelen aanwezig zijn en of ze zich op de correcte plaats bevinden. Als er een bout of schroef ontbreekt, stuurt hij een signaal naar het besturingssysteem…

Silicone trillingsdempers of "stickies" (kleefstrips) worden op verschillende delen van de carrosserie gekleefd om geluid en trillingen tijdens het rijden te beperken. Om te verzekeren dat de trillingsdempers zich op de juiste plaats bevinden, wordt het hoogteprofiel van elke kleefstrip via teach-in in de SmartRunner Matcher ingevoerd en worden de hoogteprofielen op elke carrosserie vergeleken met een referentieprofiel...

In de automobielproductie worden skids gebruikt om carrosserieën van de ene werkpost naar de andere te vervoeren. Skidbouten bevestigen de carrosserieën aan de skids en worden in de speciaal daarvoor voorziene verankeringsgaten aangebracht. De SmartRunner controleert de positie en uitlijning van de bouten voordat een carrosserie op de skid wordt geplaatst.

Vaak worden robots en robotautomaten gebruikt voor de toevoer van individuele onderdelen of ruwe grondstoffen in productie- of verwerkingsprocessen. Voordat een robot een onderdeel uit de werkstukdrager kan verwijderen, moet de aanwezigheid van het onderdeel in de drager (aanwezigheidscontrole) en de positie van het onderdeel (positiecontrole) worden geverifieerd. De SmartRunner Matcher voert beide taken uit in één stap.
In de voedingsindustrie worden voor de productie van kant-en-klaarmaaltijden vaak plastic schaaltjes met onderverdelingen gebruikt. Om te garanderen dat de compartimenten met de juiste voedingswaren worden gevuld, moet eerst worden gecontroleerd of de volledig witte schaaltjes correct gepositioneerd zijn. De SmartRunner Matcher levert zelfs onder de meest uitdagende omgevingsomstandigheden duidelijke detectieresultaten.

Ontdek de SmartRunner-laserprofielsensoren met een unieke combinatie van lichtsectietechnologie en een 2D-vision sensor met ingebouwde LED’s …


Pepperl+Fuchs N.V.
Metropoolstraat 11
2900 Schoten / Anvers
BELGIË
BTW BE 0436.097.152, RPR Antwerpen, afd. Antw.
sales@be.pepperl-fuchs.com
 +32 3 644 25 00
+32 3 644 25 00
Pepperl+Fuchs is een toonaangevend ontwikkelaar en producent van elektronische sensoren en componenten voor de wereldwijde automatiseringsmarkt. Continue innovatie, hoge kwaliteit en gestage groei zijn de basis van ons succes, al meer dan 70 jaar. Pepperl+Fuchs heeft wereldwijd 6300 medewerkers en productiefaciliteiten in Duitsland, de Verenigde Staten, Singapore, Hongarije, Indonesië en Vietnam, waarvan het merendeel ISO 9001 gecertificeerd.