

Carga y descarga automáticas de transportadores de carga
Datos 3D para la detección de alta resolución durante la transferencia
La aplicación
Los vehículos de guiado automático (AGV, AMR) realizan numerosas tareas de transporte en el ámbito de la intralogística. Las mercancías transportadas suelen colocarse en palés u otros soportes de carga estandarizados. Los vehículos autónomos recogen y depositan los palés de forma totalmente automática. Estas operaciones pueden realizarse en estaciones de transferencia fijas o en cualquier posición de almacenamiento. También es posible apilar palés y recoger el del nivel superior.
El objetivo
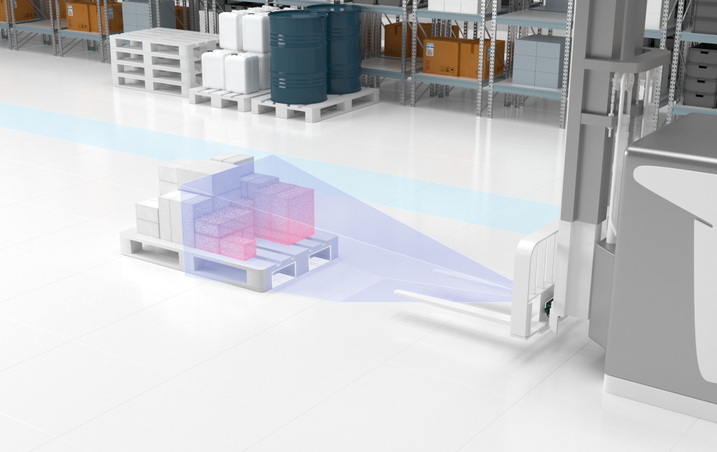
Durante la carga, debe detectarse la posición del palé para desplazar correctamente el vehículo bajo el palé o introducir los brazos de la horquilla en las aberturas del palé. El palé no debe desplazarse durante este proceso. Al descargar el palé, debe detectarse si el palé se ha desprendido de la horquilla.
The Solution

SmartRunner Explorer 3-D
The SmartRunner Explorer 3-D vision sensor is mounted on the mast or between the vehicle’s fork arms. Its sensing range is directed toward the load carrier. When approaching the pallet and during the loading and unloading process, the sensor uses the time-of-flight (ToF) technology to provide measurement data in the form of a 3-D point cloud, which the target area displays at a very high resolution of 307,200 pixels. The vehicle controller therefore receives the information that allows the process to be finely adjusted.
Technical Features
- Laser class 1 for eye safety
- Operating frequency up to 30 Hz
- Gigabit Ethernet TCP/IP interface
- Compact dimensions (165 × 67 × 56 mm)
- Suppression of ambient light > 100 klx
- Raw image size 640 × 480 pixels

Las ventajas

Información sobre SmartRunner Explorer 3D
SmartRunner Explorer 3D ofrece una solución fiable para controlar las operaciones de carga y descarga. Este dispositivo compacto se adapta a espacios muy reducidos. Gracias a su elevada frecuencia de medición de 30 Hz, proporciona datos fiables incluso en procesos de alta velocidad. Además, se caracteriza por su eficiente procesamiento de los datos de medición. Escanea mediante luz infrarroja con una longitud de onda de 940 nanómetros. Esto hace que sea especialmente resistente a la luz ambiental y, por lo tanto, ideal para su uso en exteriores.
Características principales
- Las imágenes 3D de alta resolución del objetivo proporcionan una serie de datos fiables para el control del vehículo
- La alta frecuencia de medición permite una detección fiable incluso en procesos de gran velocidad
- Es una solución fiable para la carga y descarga
- Ofrece un eficiente procesamiento de los datos de medición

Obtenga más información sobre SmartRunner Explorer 3D con visión estereoscópica y tecnología de "Time-of-Flight".

Los vehículos de guiado automático se han convertido en un componente indispensable en los procesos modernos de manipulación de materiales. Descubra nuestros sensores y soluciones para la manipulación de cargas, la navegación y el guiado, y el reconocimiento del entorno.


Pepperl+Fuchs, S.A.
Txori-Erri Etorbidea, 46
Edificio Esser
48150 Sondika (Vizcaya)
España
sov@es.pepperl-fuchs.com
 +34 94 4535 020
+34 94 4535 020
Pepperl + Fuchs es líder en el desarrollo y la fabricación de sensores electrónicos y componentes para el mercado de la automatización global. Su incesante innovación, calidad duradera y crecimiento constante garantizan el éxito continuado, desde hace más de 70 años. Pepperl + Fuchs emplea a 6.300 personas en todo el mundo y cuenta con fábricas en Alemania, EE.UU., Singapur, Hungría, Indonesia y Vietnam, la mayoría de ellas con certificado ISO 9001.