
Línea de servicio de Sensores Industriales
Teléfono: +34 94 453 50 20
Fax: +34 94 453 51 80
Atención al cliente para protección contra explosiones
Teléfono: +34 94 453 50 20
Fax: +34 94 453 51 80

Línea de servicio de Sensores Industriales
Teléfono: +34 94 453 50 20
Fax: +34 94 453 51 80
Atención al cliente para protección contra explosiones
Teléfono: +34 94 453 50 20
Fax: +34 94 453 51 80
Línea de servicio de Sensores Industriales
Teléfono: +34 94 453 50 20
Fax: +34 94 453 51 80
Atención al cliente para protección contra explosiones
Teléfono: +34 94 453 50 20
Fax: +34 94 453 51 80

Interfaces universales para la implementación sencilla de aplicaciones de visión
2024-10-10

La salida de datos brutos ofrece una amplia gama de posibilidades para la implementación de aplicaciones de visión individuales. Al mismo tiempo, el esfuerzo necesario para evaluar estos datos de forma convencional es relativamente alto. Por este motivo, Pepperl+Fuchs ha equipado ahora el sensor de perfil láser SmartRunner Explorer y el sensor de visión 3D SmartRunner Explorer con las interfaces GenICam y ROS independientes del fabricante. Esto permite un acceso universal a los datos y parámetros, así como a una variedad de módulos de programación en bibliotecas de software. Esto ahorra a los usuarios tiempo y dinero a la hora de implementar aplicaciones de visión industrial.
Datos estandarizados y acceso a bibliotecas de procesamiento de imágenes con GenICam
Cada sensor de visión es diferente, por lo que los usuarios a menudo tienen que familiarizarse con las estructuras de datos de los sistemas propietarios antes de poder evaluar los datos brutos. Para minimizar este esfuerzo se desarrolló la interfaz de programación universal GenICam. Este estándar de la Asociación Europea de Visión Artificial (EMVA) reúne los datos y parámetros específicos del producto en una estructura genérica y permite una edición y un procesamiento estandarizados.
GenICam también se puede utilizar para conectar SmartRunner Explorer y SmartRunner Explorer 3-D a bibliotecas de procesamiento de imágenes como HALCON. Las aplicaciones de procesamiento de imágenes se pueden implementar de forma rápida y sencilla utilizando los módulos de programación listos para usar disponibles allí. Como GenICam permite utilizar el mismo marco para diferentes sensores, se pueden integrar fácilmente nuevos dispositivos en aplicaciones existentes.
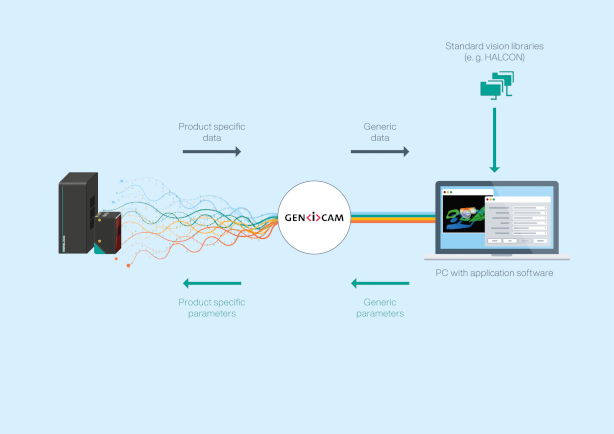
El estándar GenICam reúne datos específicos del producto en una estructura genérica y permite el acceso a módulos de programación en bibliotecas de procesamiento de imágenes.
Aplicaciones robóticas complejas y pruebas de conceptos sencillas con ROS
Desde aplicaciones de pick-and-place hasta control de calidad y prevención de colisiones: el sensor de perfil láser SmartRunner Explorer y el sensor de visión 3D SmartRunner Explorer se encargan de tareas exigentes en robots de producción o vehículos guiados automáticamente (AGV). Estas aplicaciones suelen ser complejas y costosas de implementar. Las diferentes interfaces y la gran cantidad de proveedores de sensores y actuadores dificultan aún más la implementación.
En este caso, el marco de trabajo Robot Operating System (ROS) de código abierto entra en juego: comprende una gama de bibliotecas de software, herramientas y programas que están disponibles como software de código abierto. Esto permite implementar aplicaciones de forma rápida y sencilla en PC o PC industriales.
ROS también ofrece ventajas para aplicaciones que van más allá de la robótica. Por ejemplo, las herramientas de código abierto se pueden utilizar para realizar pruebas de concepto rentables que se pueden utilizar como base para decisiones de inversión.
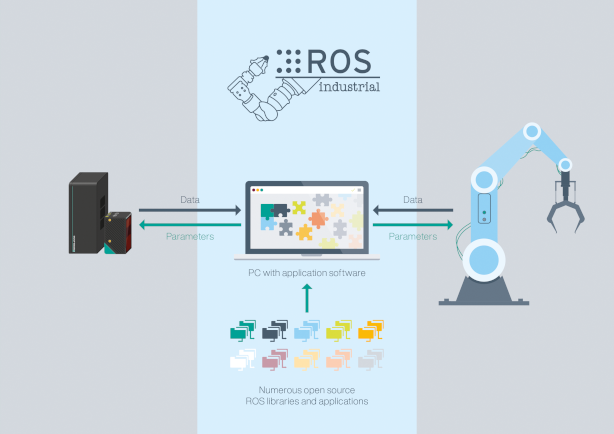
ROS ofrece a los usuarios acceso a una amplia gama de herramientas de código abierto que pueden utilizarse para implementar aplicaciones de forma sencilla y rentable.
Aspectos destacados de las interfaces universales
- Ahorro de tiempo y costes gracias al acceso a módulos de programación en bibliotecas de procesamiento de imágenes.
- Prueba de concepto rápida y sencilla para nuevas aplicaciones.
- Integración de sensores de visión independiente del fabricante.
- No es necesario familiarizarse con interfaces específicas del fabricante.
Productos

Obtenga más información sobre SmartRunner Explorer 3D con visión estereoscópica y tecnología de "Time-of-Flight".

Descubra los sensores de perfil láser SmartRunner, equipados con una combinación exclusiva de tecnología de sección de luz y un sensor de visión en 2-D con LED integrados…


Pepperl+Fuchs, S.A.
Txori-Erri Etorbidea, 46
Edificio Esser
48150 Sondika (Vizcaya)
España
sov@es.pepperl-fuchs.com
 +34 94 4535 020
+34 94 4535 020
© 2025 Todos los derechos reservados
Pepperl + Fuchs es líder en el desarrollo y la fabricación de sensores electrónicos y componentes para el mercado de la automatización global. Su incesante innovación, calidad duradera y crecimiento constante garantizan el éxito continuado, desde hace más de 70 años. Pepperl + Fuchs emplea a 6.300 personas en todo el mundo y cuenta con fábricas en Alemania, EE.UU., Singapur, Hungría, Indonesia y Vietnam, la mayoría de ellas con certificado ISO 9001.