| Accessory of |

|
|
|
| Ethernet IO-Link module with eight IO-Link portsfa |
|

|
|
|
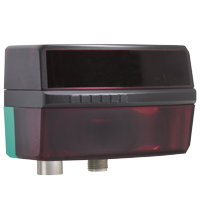
| Optical Print Inspector, reads all common 1-D and 2-D codes, detects logos, Ethernet, RS 232, speeds of up to 6 m/sfa |
|

|
|
|
| R2000 HD, 2-D LiDAR sensor for precise measurement tasks and positioning, measuring range to object up to 30 m, Ethernet, High operating range, High angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology), Flexible measured data filterfa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 30 m, Ethernet, High operating range, Very high angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology), Flexible measured data filterfa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 30 m with three M12 x 1 connector plugs, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, High angle resolution, 360°-angle of measurementfa |
|

|
|
|
| Read head for incident light positioning system, SIL 3 (EN 61508), PROFINET interface, Category 4 PL e (EN ISO 13849), PROFIsafe interface, Safe, non-contact positioning on Data Matrix code tape, Traverse distance up to 100 km , Mechanically rugged: no wearing parts, long operating life, maintenance-free, Output of code quality, Pollution detectionfa |
|

|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|

|
|
|
| Sheet inspection sensor for monitoring print by comparing stored images or barcode evaluationfa |
|

|
|
|
| Laser light sensor for profile matching; Resolution: 1280 x 960 Pixel; Measuring range: X = 60 ... 345 mm, Z = 100 ... 700 mm; Scan rate: 30 s-1; Ethernet TCP/IP interfacefa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|

|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
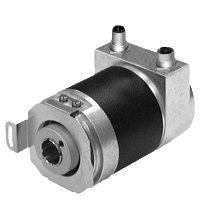
| Industrial standard housing ∅58 mm, Ethernet interface with TCP/IP, 30 Bit multiturn, Integrated webserver, Recessed hollow shaft, Enclosure type: 58 mm, Type of shaft: Recessed hollow shaft, Interface: Ethernet TCP/IP, Detection type: photoelectric sampling, Interface type: TCP/IP, Physical : Ethernetfa |
|
|
|
|
|
| Industrial standard housing ∅58 mm, Ethernet interface with TCP/IP, 16 Bit singleturn, Integrated webserver, Recessed hollow shaft, Enclosure type: 58 mm, Type of shaft: Recessed hollow shaft, Interface: Ethernet TCP/IP, Detection type: photoelectric sampling, Interface type: TCP/IP, Physical : Ethernetfa |
|
|
|
|
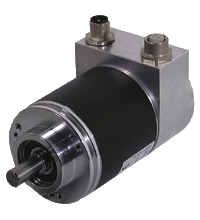
| Industrial standard housing ∅58 mm, Ethernet interface with TCP/IP, 30 Bit multiturn, Integrated webserver, Servo or clamping flange, Enclosure type: 58 mm, Type of shaft: Solid shaft, Interface: Ethernet TCP/IP, Detection type: photoelectric sampling, Interface type: TCP/IP, Physical : Ethernetfa |
|
|
|
|
|
| Industrial standard housing ∅58 mm, Ethernet interface with TCP/IP, 16 Bit singleturn, Integrated webserver, Servo or clamping flange, Enclosure type: 58 mm, Type of shaft: Solid shaft, Interface: Ethernet TCP/IP, Detection type: photoelectric sampling, Interface type: TCP/IP, Physical : Ethernetfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
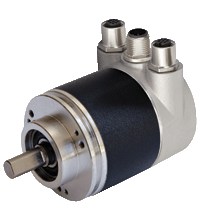
| Industrial standard housing ∅58 mm, Ethernet interface with Powerlink, 16 Bit singleturn, Two Ethernet connectors with built in hub, Servo or clamping flange, Enclosure type: 58 mm, Type of shaft: Solid shaft, Interface: Ethernet POWERLINK, Detection type: photoelectric sampling, Interface type: Ethernet Powerlink, Physical : Ethernet, Protocol: Powerlink standard protocolfa |
|
|
|
|
|
| Industrial standard housing ∅58 mm, Ethernet interface with Powerlink, 30 Bit multiturn, Two Ethernet connectors with built in hub, Servo or clamping flange, Enclosure type: 58 mm, Type of shaft: Solid shaft, Interface: Ethernet POWERLINK, Detection type: photoelectric sampling, Interface type: Ethernet Powerlink, Physical : Ethernet, Protocol: Powerlink standard protocolfa |
|

|
|
|
| Industrial standard housing ∅58 mm, Ethernet interface with Powerlink, 16 Bit singleturn, Two Ethernet connectors with built in hub, Recessed hollow shaft, Enclosure type: 58 mm, Type of shaft: Recessed hollow shaft, Interface: Ethernet POWERLINK, Detection type: photoelectric sampling, Interface type: Ethernet Powerlink, Physical : Ethernet, Protocol: Powerlink standard protocolfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|
|
|
|
|
| Precision positioning on hole in the 70 mm x 70 mm housingfa |
|

|
|
|
| Optical Print Inspector, reads all common 1-D and 2-D codes, detects logos, Ethernet, RS 232, speeds of up to 10 m/s; polarization filterfa |
|
|
|
|
|
| Stationary multicode read device for all common 1-D, 2-D and Pharmacodes at speeds of 10 m/s, XVGA resolution, Ethernetfa |
|
|
|
|
|
| Optical Print Inspector, reads all common 1-D and 2-D codes, detects logos, Ethernet, RS 232, speeds of up to 10 m/s; polarization filterfa |
|

|
|
|
| Optical Print Inspector, reading of Data Matrix codes, PROFINET, speeds up to 10 m/sec, polarization filterfa |
|
|
|
|
|
| Industrial standard housing ∅58 mm, Ethernet interface with Powerlink, 30 Bit multiturn, Two Ethernet connectors with built in hub, Recessed hollow shaft, Enclosure type: 58 mm, Type of shaft: Recessed hollow shaft, Interface: Ethernet POWERLINK, Detection type: photoelectric sampling, Interface type: Ethernet Powerlink, Physical : Ethernet, Protocol: Powerlink standard protocolfa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 60 m, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, High angle resolution, 360°-angle of measurementfa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 10 m, Ethernet, Very high angle resolution, Red laser as the light emitter, Measuring method PRT (Pulse Ranging Technology), Flexible measured data filterfa |
|
|
|
|
|
| R2000 HD, 2-D LiDAR sensor for simple measurement tasks and positioning, measuring range to object up to 12 m, Ethernet, Middle operating range, High angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 30 m, Ethernet, High operating range, Very high angle resolution, Infrared light, Deep-freeze applications, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 30 m with three M12 x 1 connector plugs, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, High angle resolution, Deep-freeze applicationsfa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 30 m, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, 360°-angle of measurement, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 60 m, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, High angle resolution, 360°-angle of measurementfa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 60 m, Ethernet, High operating range, Very high angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology), Flexible measured data filterfa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 60 m, Ethernet, High operating range, Very high angle resolution, Infrared light, Deep-freeze applications, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
| R2300, 3-D LiDAR sensor for object detection and positioning, measuring range to object up to 10 m, Ethernet, High angle resolution, Can be aligned using an integrated pilot laser, Measuring method PRT (Pulse Ranging Technology), Compact design, High pollution tolerancefa |
|
|
|
|
|
| R2300, 2-D LiDAR sensor for object detection and positioning, measuring range to object up to 10 m, Ethernet, High angle resolution, Can be aligned using an integrated pilot laser, Measuring method PRT (Pulse Ranging Technology), Compact design, High pollution tolerancefa |
|
|
|
|
|
| R2000 SD, 2-D LiDAR sensor for simple measurement tasks and positioning, measuring range to object up to 25 m, Ethernet, High operating range, High angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology)fa |
|

|
|
|
| Read head for incident light positioning system, SIL 3 (EN 61508), Category 4 PL e (EN ISO 13849), PROFINET interface, PROFIsafe interface, Safe, non-contact positioning on Data Matrix code tape, Traverse distance up to 100 km , Mechanically rugged: no wearing parts, long operating life, maintenance-free, Output of code quality, Pollution detectionfa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 10 m, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High angle resolution, 360°-angle of measurement, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
|
| Laser light sensor for profile matching; Resolution: 1280 x 960 Pixel; Measuring range: X = 40 ... 160 mm, Z = 60 ... 350 mm; Scan rate: 30 s-1; Ethernet TCP/IP interfacefa |
|








 +39 039 69599 1
+39 039 69599 1