| Accesorio de |

|
|
|
| Ethernet IO-Link module with eight IO-Link portsfa |
|

|
|
|
| R2000 HD, 2-D LiDAR sensor for precise measurement tasks and positioning, measuring range to object up to 30 m, Ethernet, High operating range, High angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology), Flexible measured data filterfa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 30 m, Ethernet, High operating range, Very high angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology), Flexible measured data filterfa |
|
|
|
|
|
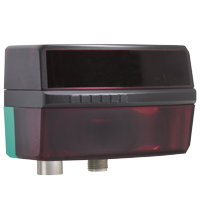
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 30 m with three M12 x 1 connector plugs, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, High angle resolution, 360°-angle of measurementfa |
|

|
|
|
| EtherNet/IP IO-Link master with 8 inputs/outputsfa |
|
|
|
|
|
| PROFINET IO IO-Link master with 8 inputs/outputsfa |
|
|
|
|
|
| PROFINET and Modbus IO-Link master with 4 x IO-Link Class A and 4 x IO-Link Class B portsfa |
|

|
|
|
| Ethernet IO-Link master with PROFINET S2 redundancyfa |
|
|
|
|
|
| Ethernet IO-Link module with 4x Class A and 4x Class B IO-Link portsfa |
|

|
|
|
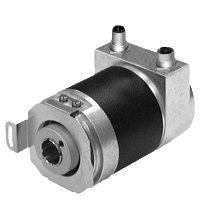
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con Powerlink, 30 Bit Multivuelta, Dos conectores Ethernet con concentrador integrado, Eje hueco insertable, Tipo de carcasa: 58 mm, Versión de eje: Eje hueco insertable, Interfaz: Ethernet POWERLINK, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: Ethernet Powerlink, Físico: Ethernet, Protocolo l: Powerlink protocolo estándarfa |
|
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con Powerlink, 16 Bit Unavuelta, Dos conectores Ethernet con concentrador integrado, Eje hueco insertable, Tipo de carcasa: 58 mm, Versión de eje: Eje hueco insertable, Interfaz: Ethernet POWERLINK, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: Ethernet Powerlink, Físico: Ethernet, Protocolo l: Powerlink protocolo estándarfa |
|
|
|
|
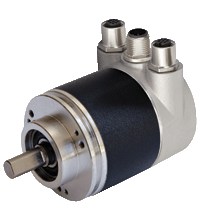
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con TCP/IP, 16 Bit Unavuelta, Servidor de Web integrado, Eje hueco insertable, Tipo de carcasa: 58 mm, Versión de eje: Eje hueco insertable, Interfaz: Ethernet TCP/IP, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: TCP/IP, Físico: Ethernetfa |
|
|
|
|
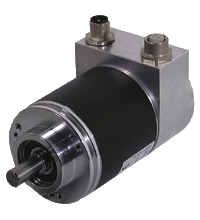
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con TCP/IP, 30 Bit Multivuelta, Servidor de Web integrado, Brida servo o brida de sujeción, Tipo de carcasa: 58 mm, Versión de eje: Eje macizo, Interfaz: Ethernet TCP/IP, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: TCP/IP, Físico: Ethernetfa |
|
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con TCP/IP, 16 Bit Unavuelta, Servidor de Web integrado, Brida servo o brida de sujeción, Tipo de carcasa: 58 mm, Versión de eje: Eje macizo, Interfaz: Ethernet TCP/IP, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: TCP/IP, Físico: Ethernetfa |
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con Powerlink, 16 Bit Unavuelta, Dos conectores Ethernet con concentrador integrado, Brida servo o brida de sujeción, Tipo de carcasa: 58 mm, Versión de eje: Eje macizo, Interfaz: Ethernet POWERLINK, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: Ethernet Powerlink, Físico: Ethernet, Protocolo l: Powerlink protocolo estándarfa |
|
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con Powerlink, 30 Bit Multivuelta, Dos conectores Ethernet con concentrador integrado, Brida servo o brida de sujeción, Tipo de carcasa: 58 mm, Versión de eje: Eje macizo, Interfaz: Ethernet POWERLINK, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: Ethernet Powerlink, Físico: Ethernet, Protocolo l: Powerlink protocolo estándarfa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 60 m, Ethernet, High operating range, Very high angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology), Flexible measured data filterfa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 60 m, Ethernet, High operating range, Very high angle resolution, Infrared light, Deep-freeze applications, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
| R2300, 2-D LiDAR sensor for object detection and positioning, measuring range to object up to 10 m, Ethernet, High angle resolution, Can be aligned using an integrated pilot laser, Measuring method PRT (Pulse Ranging Technology), Compact design, High pollution tolerancefa |
|
|
|
|
|
| R2300, 3-D LiDAR sensor for object detection and positioning, measuring range to object up to 10 m, Ethernet, High angle resolution, Can be aligned using an integrated pilot laser, Measuring method PRT (Pulse Ranging Technology), Compact design, High pollution tolerancefa |
|
|
|
|
|
| R2000 SD, 2-D LiDAR sensor for simple measurement tasks and positioning, measuring range to object up to 25 m, Ethernet, High operating range, High angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 60 m, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, High angle resolution, 360°-angle of measurementfa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 10 m, Ethernet, Very high angle resolution, Red laser as the light emitter, Measuring method PRT (Pulse Ranging Technology), Flexible measured data filterfa |
|
|
|
|
|
| R2000 HD, 2-D LiDAR sensor for simple measurement tasks and positioning, measuring range to object up to 12 m, Ethernet, Middle operating range, High angle resolution, Infrared light, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
|
| R2000 UHD, 2-D LiDAR sensor for precise and highly dynamic positioning, measuring range to object up to 30 m, Ethernet, High operating range, Very high angle resolution, Infrared light, Deep-freeze applications, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 30 m with three M12 x 1 connector plugs, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, High angle resolution, Deep-freeze applicationsfa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 30 m, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, 360°-angle of measurement, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 60 m, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High operating range, High angle resolution, 360°-angle of measurementfa |
|
|
|
|
|
| R2000 Detection, 2-D LiDAR sensor for precise field monitoring, measuring range to object up to 10 m, 4 freely programmable monitoring fields, 4 inputs/outputs (selectable), High angle resolution, 360°-angle of measurement, Measuring method PRT (Pulse Ranging Technology)fa |
|
|
|
|
| Cable, PUR/PP, verde de 4 hilos, Cat5e, apantallado, homologación UL, apto para cadena de arrastrefa |
|
|
|
|
|
| Carcasa industrial estándar de ∅58 mm, Interface Ethernet con TCP/IP, 30 Bit Multivuelta, Servidor de Web integrado, Eje hueco insertable, Tipo de carcasa: 58 mm, Versión de eje: Eje hueco insertable, Interfaz: Ethernet TCP/IP, Modo de detección: Exploración fotoeléctrico, Tipo de Interfaz: TCP/IP, Físico: Ethernetfa |
|
|
|
|
|
| EtherNet/IP and Modbus IO-Link master with 4 x IO-Link Class A and 4 x IO-Link Class B portsfa |
|

|
|
|
| Ethernet IO-Link module with 8 inputs/outputsfa |
|

|
|
|
| Ethernet IO module with 16 configurable digital inputs/outputs and integrated logicfa |
|
|
|
|
|
| Firmware variant from ICE3-8IOL-G65L-V1D with Modbus enabled by defaultfa |
|
|
|
|
|
| Ethernet IO-Link module with 8 inputs/outputsfa |
|
|
|
|
|
| Ethernet IO module with 8 digital inputs/outputsfa |
|
|
|
|
|
| Ethernet IO module with 8 digital inputs/outputs and a control functionfa |
|
|
|
|
|
| Ethernet IO module with 16 digital inputsfa |
|

|
|
|
| Ethernet IO module with 16 configurable digital inputs/outputsfa |
|










 +34 94 4535 020
+34 94 4535 020