

Metoda detekce a funkce

Pro různé úlohy detekce lze použít různé principy snímání. K určení nejvhodnějšího principu snímání pro konkrétní aplikaci je potřebné zvážit různá hlediska: Patří mezi ně materiál detekovaného objektu, prostředí aplikace a vzdálenost, z které má být detekce prováděna.
Pro objekty, které jsou elektricky vodivé, například kovové objekty, a které lze detekovat z těsné blízkosti, je doporučen indukční senzor.
Indukční senzory fungují tak, že emitují vysokofrekvenční střídavé magnetické pole. Když se k tomuto magnetickému poli přiblíží kovový spínací cíl, dojde k extrahování energie ze střídavého pole prostřednictvím ztrát způsobených vířivými proudy. Kromě toho feromagnetické spínací cíle způsobí ztrátu přemagnetováním. Tyto ztráty jsou vyhodnoceny a při dosažení definované prahové hodnoty se senzor sepne.
Mezi typické aplikace patří sledování polohy všech druhů, sledování poloh ventilů a detekce rychlosti pohybu pásu. Díky vynikající univerzálnosti principu fyzického snímání je na trhu k dispozici mnoho různých typů provedení a verzí senzorů, které vyhovují specifickým provozním podmínkám, jako jsou senzory s redukčním faktorem 1, senzory NAMUR, senzory s kovovou snímací plochou a senzory s certifikací E1 pro použití ve vozidlech.
V závislosti na aplikaci lze jako alternativu použít následující principy snímání:
- Kapacitní senzor: pro detekci objektů vyrobených z plastu nebo papíru, kapalin (olejnatých nebo vodných), granulí a prášků
- Senzor magnetického pole: objekty, které jsou magnetické nebo mohou být vybaveny magnetem
Provedení indukčních senzorů

Indukční senzory jsou bezkontaktní. Senzory detekují kovové objekty, které se nacházejí v jejich měřicím poli. K tomu využívají interakci kovového objektu jako elektrického vodiče s emitovaným střídavým magnetickým polem senzoru. V elektrickém vodiči jsou indukovány vířivé proudy, které extrahují energii z pole, a tím ovlivňují úroveň amplitudy oscilace.
Základem indukčního senzoru je cívka, obvykle s feritovým jádrem, která umožňuje magnetickému poli unikat určitým směrem. Oscilátor umístěný v senzoru za cívkou používá LC rezonanční obvod k vytváření střídavého magnetického pole, které uniká ze snímací plochy senzoru. V kovovém objektu, který se nachází v měřicím poli, jsou indukovány vířivé proudy. Ty extrahují energii z oscilátoru. Tím se změní úroveň signálu v oscilátoru. Změna v úrovni signálu poté sepne výstupní stupeň v binárním senzoru prostřednictvím Schmittova klopného obvodu. U měřicích senzorů tato změna úrovně signálu ovlivní analogový výstupní signál v závislosti na vzdálenosti objektu.
Historie indukčních bezdotykových senzorů
První průmyslový indukční bezdotykový senzor vyvinuli v roce 1958Walter Pepperl a Wilfried Gehl a v témže roce byl uveden na trh. V té době byl vývoj řízen společností BASF. Společnost BASF chtěla nahradit mechanické spínací kontakty používané v té době k detekci zboží za bezkontaktní spínací senzory, které by nezpůsobovaly jiskření. Záměrem bylo výrazně snížit nebezpečí výbuchu. Dokonce i první indukční bezdotykový senzor byl navržen tak, aby byl jiskrově bezpečný v souladu s požadavky asociace NAMUR.
Standardizace
Všechny bezdotykové senzory a indukční senzory od společnosti Pepperl+Fuchs jsou vyvíjeny, vyráběny a prodávány v souladu s příslušnou normou IEC/EN 60947 „Spínací a řídicí přístroje nízkého napětí – část 5-2: Přístroje a spínací prvky řídicích obvodů – Bezdotykové senzory.“
Pro bezpečnostní senzory od společnosti Pepperl+Fuchs platí také odpovídající norma „Spínací a řídicí přístroje nízkého napětí – část 5-3: Přístroje a spínací prvky řídicích obvodů – Požadavky na bezdotykové přístroje s definovaným chováním při poruše (PDDB)“.
Další informace
Indukční senzory mají typické hlavní technické údaje. Ty musí být známé, aby bylo možné zajistit správné používání v závodech a aplikacích.
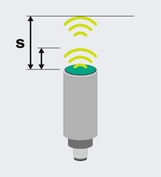
Senzor se sepne v určité vzdálenosti od kovového objektu. Tato vzdálenost je označována jako „pracovní vzdálenost“. Pracovní vzdálenost je nejdůležitější charakteristikou indukčního senzoru.



Pepperl+Fuchs s.r.o.
Pod Vodárenskou věží 4
18208 Praha 8
Czech Republic
info@cz.pepperl-fuchs.com
 +420 225 989 180
+420 225 989 180
Pepperl+Fuchs je přední vývojář a výrobce průmyslových senzorů a komponentů pro světový trh automatizace. Neustálé inovace, trvalé kvalitní a stálý růst zaručuje mnoho úspěchů přes více než 70 let. Pepperl+Fuchs zaměstnává 6300 lidí po celém světě a má výrobní závody v Německu, USA, Singapuru, Maďarsku, Indonésii a Vietnamu, které podléhají ISO 9001.