


Rakománykezelés

A rakományok felvétele, rögzítése és szállítása során az automatikus irányítású járművek (AGV-k) sokféle információt igényelnek a biztonságos és zökkenőmentes folyamatok biztosítása érdekében. Először is az automatizált járműnek pontosan kell dokkolnia a megfelelő transzferállomáson. Ki- és bepakolásnál biztosítani kell a szállítóeszközök megbízható érzékelését és helyes pozicionálását. A rakományazonosítás akkor is kihívást jelenthet, ha például egyszerre több objektumot is észlelni kell, vagy az AGV-re szerelt robotot pontosan kell irányítani.
A dokkolástól a rakományérzékelésen és -pozicionáláson át a rakományazonosításig a Pepperl+Fuchs kompakt és strapabíró érzékelők széles választékát kínálja, amelyek ideálisak az automatikus irányítású járművekben való használatra. Az érintésmentes technológiák például biztonságos anyagmozgatást biztosítanak, míg a nagy teljesítményű azonosítórendszerek megbízhatóan azonosítják a szállítójárműveket még mostoha körülmények között is.
Discover our load handling solutions for your AGV in an interactive way!
Solutions for Docking

Az áruk helyes mozgatásához az automatikus irányítású járműveknek maguktól meg kell találniuk a megfelelő pozíciót a transzferállomáson. Mivel az ezután következő lépések gyakran biztonságilag fontosak, ezen a ponton szükséges teljesíteni a funkcionális biztonsági követelményeket. Ezt a safePGV pozicionáló rendszer biztosítja, amely lehetővé teszi a biztonságos pozicionálástés azonosítást SIL 3/PL e-ig, egyetlen érzékelővel.

A be- és kipakolás során a mobil robotoknak megfelelően kell dokkolniuk egy állomáson, hogy biztosítsák a szállítójárművek zökkenőmentes mozgását. A folyamat vezérléséhez egyszerű, de strapabíró jelátvitel szükséges. Két BB10 típusú, adó-vevős fotoelektromos érzékelővel ez a feladat helytakarékos és költséghatékony módon megoldható. Két különböző átviteli frekvencia biztosítja az interferenciamentes jelátvitelt – még körbevevő fémszerkezetek esetén is.
A szállítójeszközök mozgatása során veszélyes mozgások jöhetnek létre a dokkolóállomáson. A kezelőszemélyzet biztonságának és a rendszer állandó rendelkezésre állásának biztosítása érdekében DAD15 optikai adatátviteli egységeket használnak. Ez a strapabíró, költséghatékony megoldás biztosítja a jármű megfelelő helyzetének biztonsági ellenőrzését egészen PL d szintig.
Solutions for Load Positioning and Detection
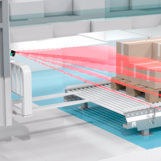
A transzferállomásokon az automatikus irányítású járművekbe történő be- és kirakodásakor a rakomány helyzetét pontosan meg kell határozni. A helyes rakodás érdekében egy R2300 3-D LiDAR érzékelő van felszerelve a jármű egyik oszlopára. Ez mérési adatokat szolgáltat az AGV közeledésekor és a rakomány berakodásakor, amely a vezérlőrendszer számára 3D pontfelhő formájában áll rendelkezésre.

Az áruk szállítása során a raklapokat automatikus irányítású járművek veszik fel és szállítják a rendeltetési helyükre, ahol újra lerakják őket. Annak érdekében, hogy a raklapok ne mozduljanak el a folyamat során, a járműre felszerelt SmartRunner Explorer 3-D képalkotó érzékelőnagy felbontású 3D képet ad a céltárgyról, ami a járművezérléshez szükséges adatokat szolgáltatja.

Az AGV-k gyakran szállítanak kocsikban elhelyezett alkatrészeket. Annak érdekében, hogy ezek a kocsik ne billenjenek vagy guruljanak el menet közben, a járművön történő megfelelő elhelyezés elengedhetetlen. Az induktív biztonsági érzékelők megbízható pozícióérzékelést biztosítanak az anyagszállító kocsi esetében SIL 2/PL d-ig. Kompakt kialakításuknak köszönhetően könnyen integrálhatók az automatikus irányítású járművek esetén.

A gyártócsarnokokban és raktárakban az autonóm mobil robotok (AMR) gyakran Euro raklapra helyezett árukat mozgatnak. Az OQT400-R200 háromszögelési érzékelő a raklap lábainak hibamentes érzékelésére szolgál. A multipixel technológiának (MPT) köszönhetően ez az érzékelő kifejezetten érzéketlen a környezeti fényhatásokra, és megbízhatóan elnyomja a meghatározatlan háttérvisszaverődéseket. Ily módon a raklap lábai mindig pontosan észlelhetőek, a hamis észlelések pedig elnyomhatóak.

Ahhoz, hogy a targonca AGV-k képesek legyenek a raklapok felvételére vagy lerakására, a villákat pontosan a célhelyzetbe kell mozgatni – még a magaspolcos raktárakban adódó nagy magasságkülönbségek esetén is. Az ECA10TL kábeldobos forgó jeladó a lehető legnagyobb pontossággal érzékeli a villa függőleges helyzetét. A forgó jeladó és mérőkábel strapabíró kialakítása lehetővé teszi a szélsőséges környezeti körülmények közötti használatot – legyen szó porról vagy szennyeződésről, nedvességről vagy erőteljes hőmérséklet-ingadozásról.
Solutions for Load Identification

Az RFID rendszerek ideális választás a megbízható, környezeti hatásoktól független rakományazonosításhoz. Mivel az automatikus irányítású járművek gyakran mostoha körülmények között működnek, az RFID rendszereknek ellenállónak kell lenniük a nagy hő- és mechanikai terhelésekkel szemben. A rendkívül strapabíró F61 RFID olvasó/írófej tökéletes erre a feladatra. Kompakt kialakításának köszönhetően különösen könnyen integrálható automatizált robotokba.

Ha a szállítóeszközön különböző tárgyak vannak, nehéz a fuvarozási megbízásban szereplő termékeket megfelelően azonosítani. Az F190 RFID olvasó/író készülék célja, hogy megfeleljen ennek a kihívásnak. Egyetlen olvasási művelet során akár 40 adathordozót is képes érzékelni a többtages kezelésnek köszönhetően. Az olvasófej nagy átviteli teljesítményének köszönhetően az RFID adathordozók azonnal észlelhetők, amint a jármű megközelíti a szállítóeszközt, így nincs betöltési késedelem.

Kocsik vagy állványok mozgatásánál az automatizált robotok beállnak a szállítóeszköz alatt kialakított helyre, hogy innen végezhessék az emelést. Itt a PGV pozicionáló rendszer két feladatot lát el egyszerre: A jármű tetejére szerelt PGV olvasókészülék egy adatmátrix-címke segítségével azonosítja a szállítóeszközt. Ugyanakkor a jármű relatív helyzetét az olvasókészülék címkéhez viszonyított helyzete alapján határozzák meg. Ez biztosítja az AGV pontos elhelyezését és a szállítóeszköz biztonságos haladását.

A gyártás során egyre gyakrabban használnak többtengelyes karú együttműködő robottal felszerelt AGV-ket annak érdekében, hogy a szükséges alkatrészeket a gépbe juttassák. A vezérlő számos különféle információt igényel az objektumok megbízható észleléséhez és a megközelítendő pozíciók pontos meghatározásához. Ehhez az alkalmazáshoz a VOS2000 kétdimenziós univerzális képalkotó érzékelő rugalmasan kombinálható képalkotó eszközkészlettel rendelkezik, beleértve a pozíció- és alakérzékeléshez, az illesztéshez és az azonosításhoz szükséges feladatokat.

Az automatikus irányítású járművek megbízható navigálásához nagy teljesítményű technológiákra van szükség. Fedezze fel navigációs és irányítási megoldásainkat!

Az AGV-knek pontosan kell észlelniük a környezetüket, hogy kizárható legyen az emberekkel és tárgyakkal való ütközés. Találja meg a környezetérzékeléshez megfelelő termékeket!


Pepperl+Fuchs Kereskedelmi Kft.
8200 Veszprém
Kistó utca 16 - 18.
Magyarország
sales@hu.pepperl-fuchs.com
 +36 88 545 902
+36 88 545 902
© 2024 Minden jog fenntartva.
A Pepperl+Fuchs az elektronikai érzékelők és alkatrészek vezető fejlesztő és gyártó vállalata a globális automatizálási piacon. A folyamatos innováció, a tartós minőség és az állandó növekedés már több mint 70 éve garantálja a sikert. A Pepperl+Fuchs 6300 embert alkalmaz világszerte, gyártóegységei vannak Németországban, az USA-ban, Szingapúrban, Magyarországon, Indonéziában és Vietnámban, legtöbbjük ISO 9001 tanusítvánnyal is rendelkezik.