


Metoda detekce a funkce

Pro různé úlohy detekce lze použít různé principy snímání. K určení nejvhodnějšího principu snímání pro konkrétní aplikaci je potřebné zvážit různá hlediska: Patří mezi ně materiál detekovaného objektu, prostředí aplikace a vzdálenost, z které má být detekce prováděna.
Použití kapacitního senzoru je doporučeno, pokud je detekovaný objekt vyroben z plastu, nerostu, skla, dřeva nebo papíru či se jedná o mastnou nebo vodnou kapalinu, granulát či prášek a požadovaná detekční vzdálenost je v rozmezí několika milimetrů.
Kapacitní senzory detekují kovové i nekovové cílové objekty. V závislosti na velikosti a vlastnostech materiálu cílového objektu, velikosti senzoru a instalačních podmínkách je možné dosáhnout pracovních vzdáleností 1 až 50 mm.
Tento typ senzoru také nabízí „transparentní funkci“ pro detekci vodných médií nebo granulí. V takovém případě senzor reaguje na obsah tenkostěnné a elektricky nevodivé nádoby vyrobené z materiálů, jako jsou sklo a plast. Pro účely použití této funkce jsou sčítány kapacitní vlivy stěny nádoby a média náplně. Použití kapacitního senzoru jako pomůcky pro pozorování umožňuje bezkontaktní sledování průtoku a hladiny kapalných médií a sypkých materiálů.
Speciální technické vlastnosti kapacitních senzorů:
- Detekce elektricky vodivých a izolačních materiálů: železné kovy, neželezné kovy, sklo, dřevo, plasty, olej, voda a vodné roztoky
- Nastavitelná pracovní vzdálenost v závislosti na objektu a vlastnostech instalace
- „Transparentní funkce“ pro použití s tenkostěnnými nádobami z nevodivých materiálů
Mezi typické aplikace patří:
- Sledování přítomnosti papíru, dřeva, skla nebo plastových materiálů
- Kontrola hladiny kapalných médií a sypkých materiálů (voda, odpadní voda, pelety, tablety, granule, toner)
- Sledování průtoku v plastových potrubích a trubkách
Vzhledem k vynikající univerzálnosti principu fyzického snímání je na trhu mnoho různých typů provedení a verzí senzorů, které vyhovují specifickým provozním podmínkám, jako jsou senzory NAMUR pro použití v prostředích s nebezpečím výbuchu.
V závislosti na aplikaci lze jako alternativu použít následující principy snímání:
- Indukční senzor: pro exkluzivní detekci kovových objektů
- Senzor magnetického pole: objekty, které jsou magnetické nebo mohou být vybaveny magnetem
Provedení kapacitních senzorů

Kapacitní senzory jsou bezkontaktní. Senzory detekují objekty umístěné v měřicím poli pomocí interakce objektu s externím střídavým elektrickým polem generovaným senzorem.
Základním prvkem kapacitního senzoru je elektroda generující střídavé elektrické pole, které působí na snímací straně. Pevný objekt nebo kapalná látka v měřicím poli ovlivňuje elektrický potenciál střídavého pole nebo způsobuje zvýšení kapacitance. Tato změna je hlášena oscilátoru. Tím se změní úroveň signálu v oscilátoru. Změna úrovně signálu je změřena a porovnána s interně definovanou prahovou hodnotou a při jejím překročení sepne výstupní stupeň binárních senzorů prostřednictvím Schmittova klopného obvodu.
Historie bezdotykového senzoru
První průmyslový bezdotykový senzor vyvinuli v roce 1958 Walter Pepperl a Wilfried Gehl a v témže roce byl uveden na trh. V té době byl vývoj řízen společností BASF. Společnost BASF chtěla nahradit mechanické spínací kontakty používané v té době k detekci zboží za bezkontaktní spínací senzory, které by nezpůsobovaly jiskření. Záměrem bylo výrazně snížit nebezpečí výbuchu. Dokonce i první bezdotykový senzor byl navržen tak, aby byl jiskrově bezpečný v souladu s požadavky asociace NAMUR.
Standardizace
Všechny bezdotykové senzory od společnosti Pepperl+Fuchs byly a jsou nadále vyvíjeny, vyráběny a uváděny na trh v souladu s příslušnou normou IEC/EN 60947 „Spínací a řídicí přístroje nízkého napětí – část 5-2: Přístroje a spínací prvky řídicích obvodů – Bezdotykové senzory“.
Pro bezpečnostní senzory od společnosti Pepperl+Fuchs platí také odpovídající norma „Spínací a řídicí přístroje nízkého napětí – část 5-3: Přístroje a spínací prvky řídicích obvodů – Požadavky na bezdotykové přístroje s definovaným chováním při poruše (PDDB)“.
Další informace
Kapacitní senzory mají typické hlavní technické údaje, které je nutné znát, aby bylo možné zajistit správné používání v závodech a aplikacích.
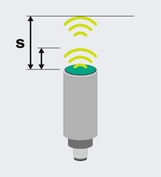
Senzor se sepne v určité vzdálenosti od referenčního cíle. Tato vzdálenost je označována jako „pracovní vzdálenost“. Pracovní vzdálenost je nejdůležitější charakteristikou kapacitního senzoru.



Pepperl+Fuchs s.r.o.
Pod Vodárenskou věží 4
18208 Praha 8
Czech Republic
info@cz.pepperl-fuchs.com
 +420 225 989 180
+420 225 989 180
© 2025 Všechna práva vyhrazena
Pepperl+Fuchs je přední vývojář a výrobce průmyslových senzorů a komponentů pro světový trh automatizace. Neustálé inovace, trvalé kvalitní a stálý růst zaručuje mnoho úspěchů přes více než 70 let. Pepperl+Fuchs zaměstnává 6300 lidí po celém světě a má výrobní závody v Německu, USA, Singapuru, Maďarsku, Indonésii a Vietnamu, které podléhají ISO 9001.